これまでの作業(その1、その2)で、
(1) 通信モジュール(電源)とLEDの取り付け
(2) Arduino(アルドゥイーノ)部分の取り付け
が終わりました。
引き続き、
(3) 2つ目のLEDの取り付け
(4) モーター、車輪の取り付け
(5) センサー(フォトリフレクター)の取り付け
を行ってスモウルボットを完成させましょう!
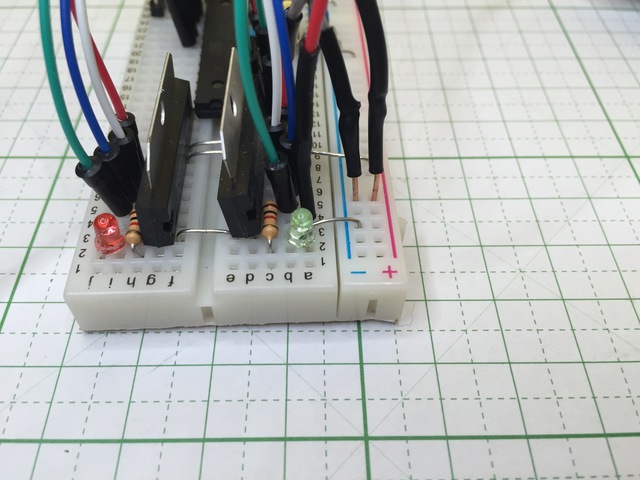
(3) 2つ目のLEDの取り付け
緑色のLEDの取り付け
緑色に光る2つ目のLEDを取り付けます。1つ目の赤色のLEDと同じように動作を確認しながら取り付けます。
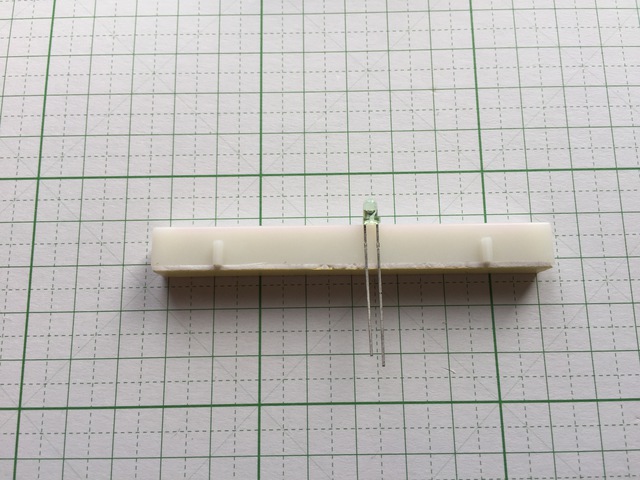
ニッパーと切り離したブレッドボードを使って、LEDのリード線の長い方をブレッドボードの高さと同じにして、短い方をブレッドボードの高さよりも2mm程度短くします。
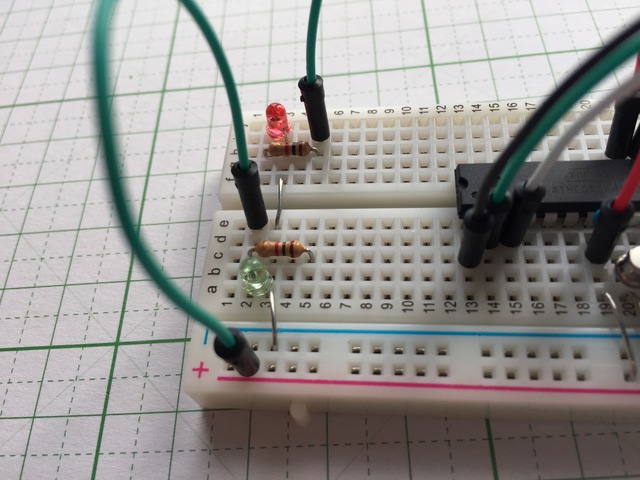
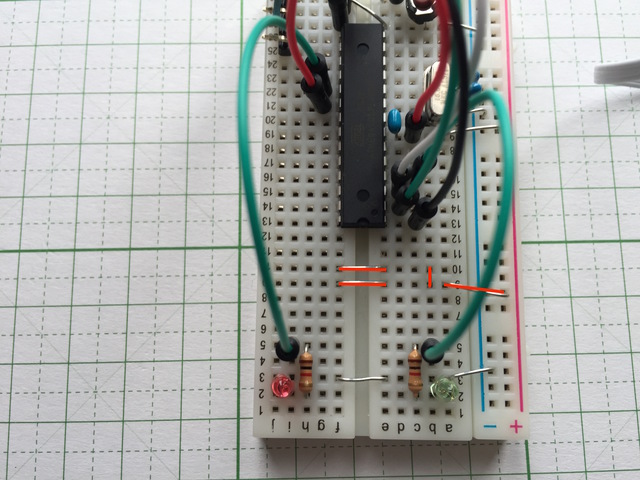
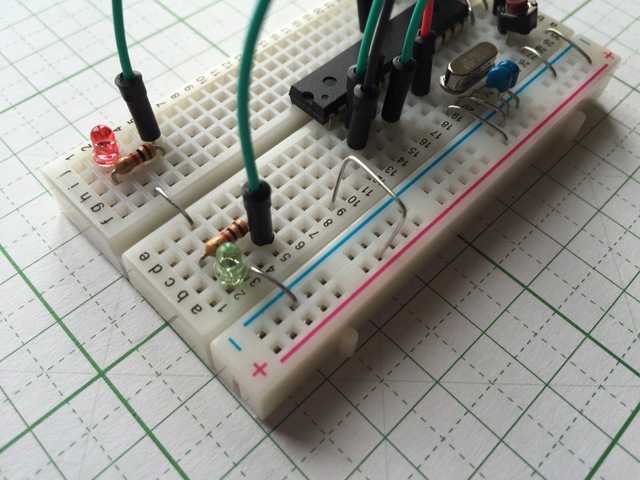
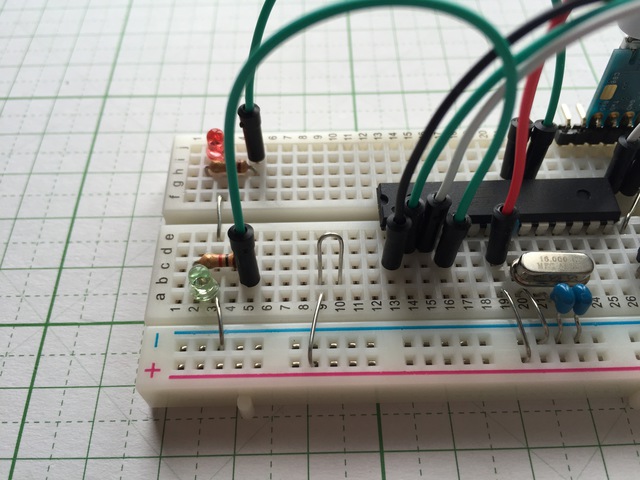
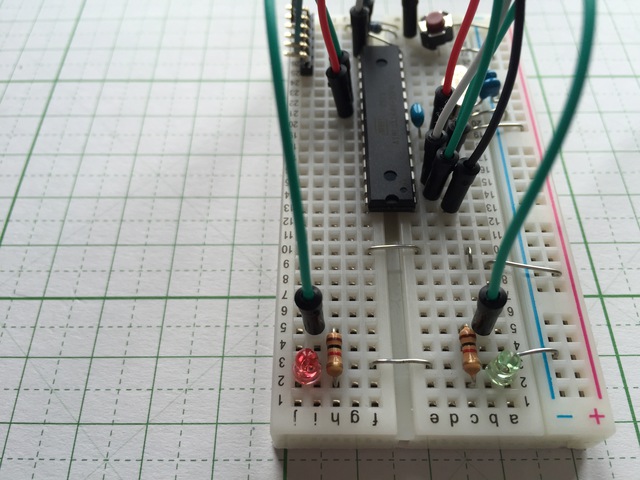
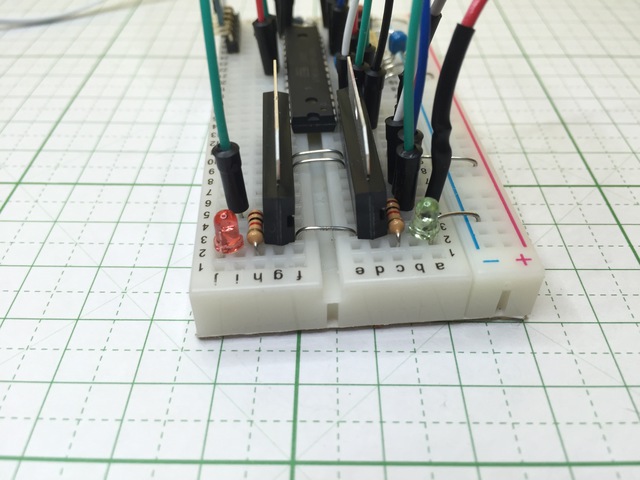
カットしたLEDの足が長い方をブレッドボード「aの2」へ、短い方をブレッドボードの「bの3」に挿します。赤色のLEDとは左右対称になっています。
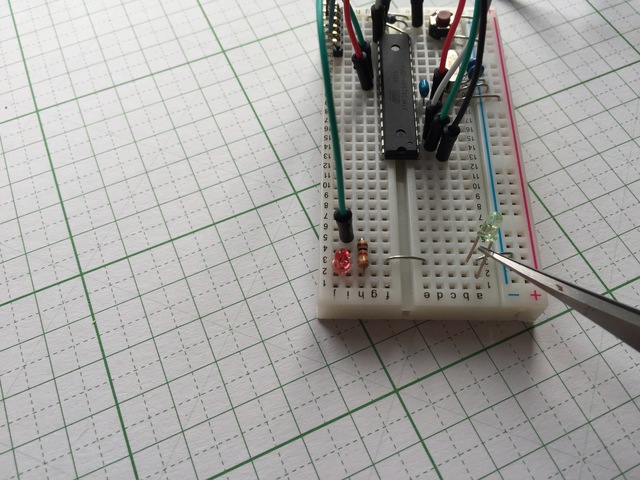
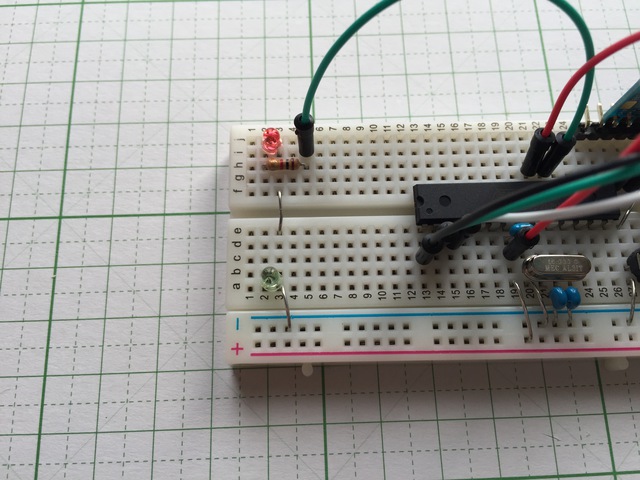
次に緑色のジャンパーケーブルを1本使います。
一方をブレッドボードの「+」に挿します。
もう一方をブレッドボードの「eの2」に挿します。
ここでUSBケーブルでコンピュータにつなぐと緑色のLEDが光るはずです。光ることを確認したらコンピュータからUSBケーブルを抜いて、電源を切っておこう。
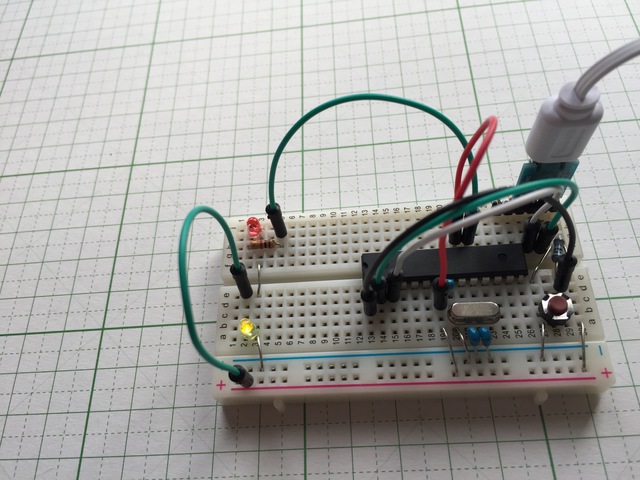
光らない場合は緑色のLEDを挿す方向を間違っている可能性があります。緑色のLEDの足が長い方をブレッドボード「aの2」へ、短い方をブレッドボードの「bの3」に挿していることを確認してください。
抵抗の取り付け
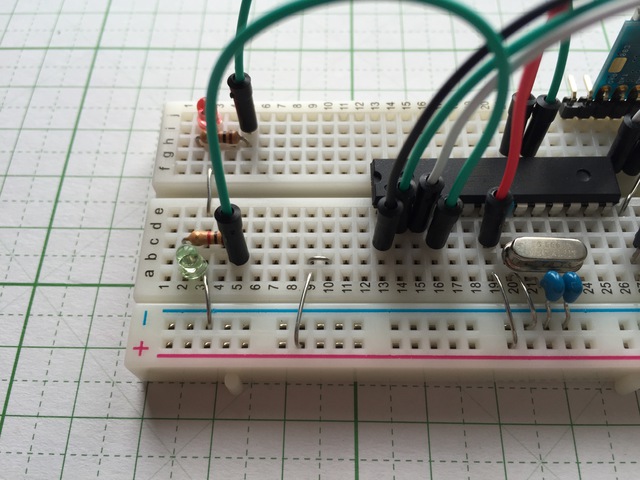
ここでも赤色のLEDのときと同じように1kΩの抵抗を取り付けます。
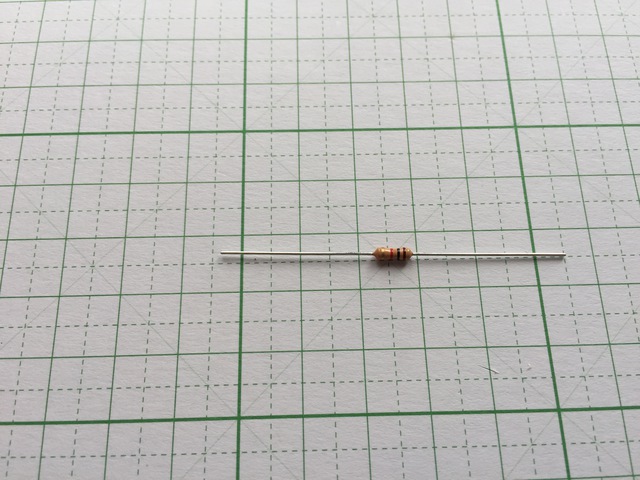
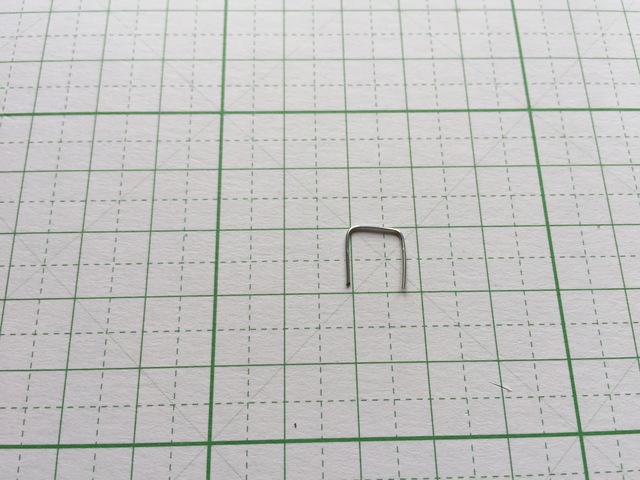
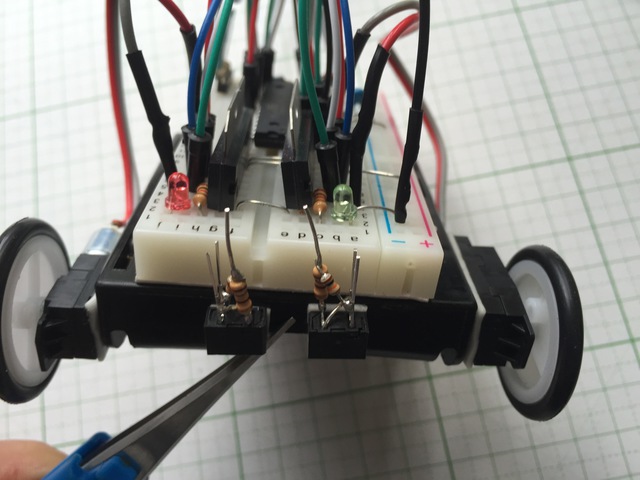
ニッパーと切り離したブレッドボードを使って、写真のようにリード線をカットして曲げます。
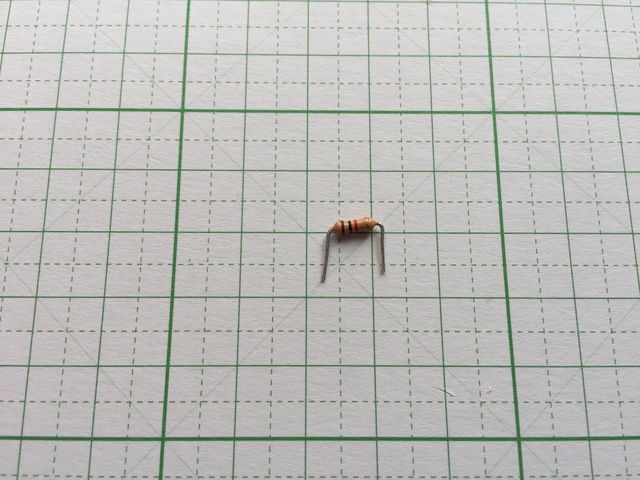
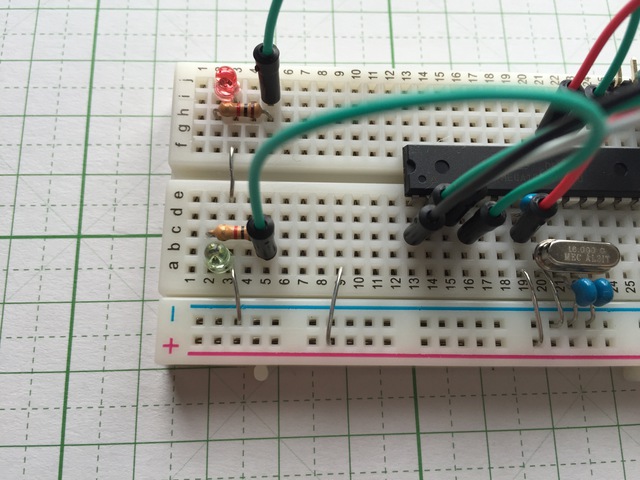
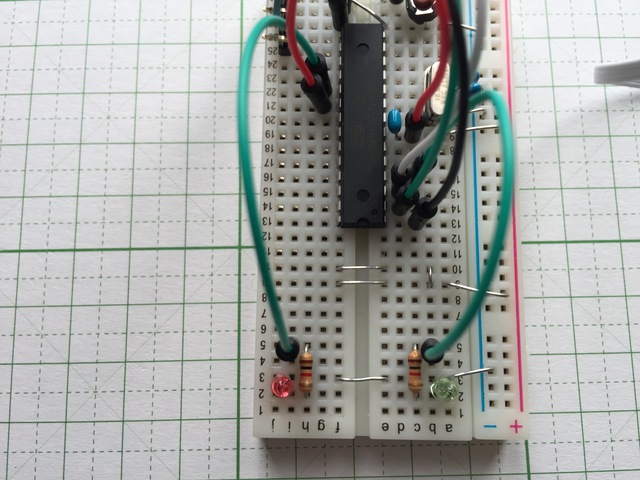
それをブレッドボードの「cの2」と「cの5」に挿します。LEDとは違って、抵抗の向きはどちらでもかまいません。
動作確認
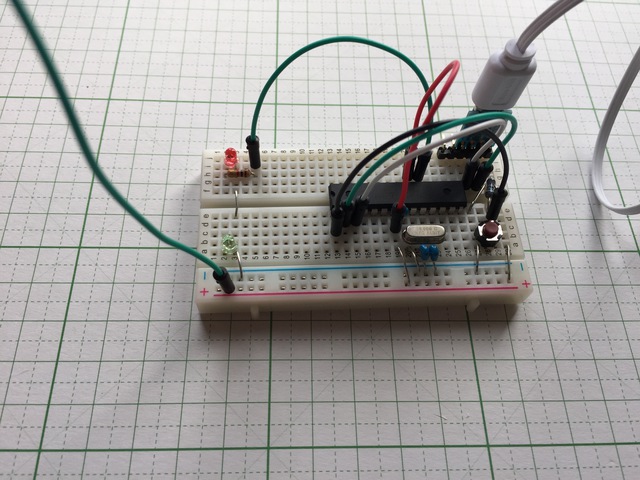
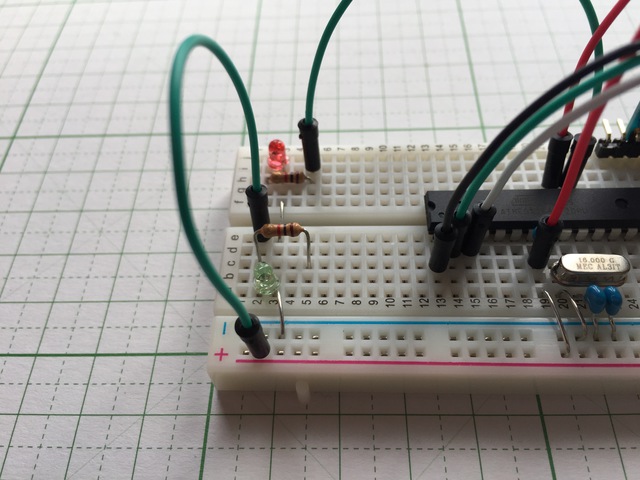
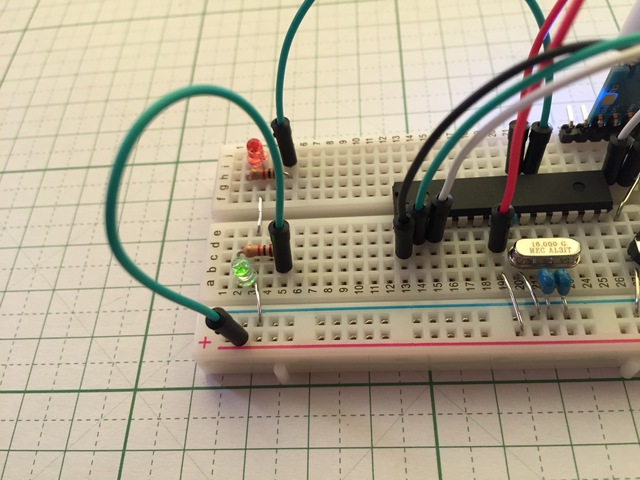
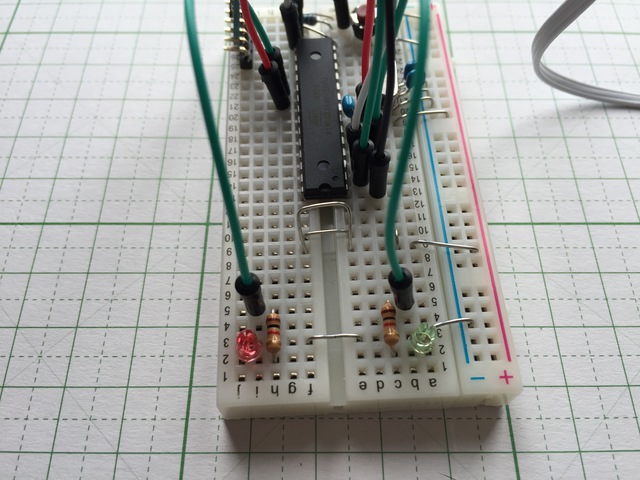
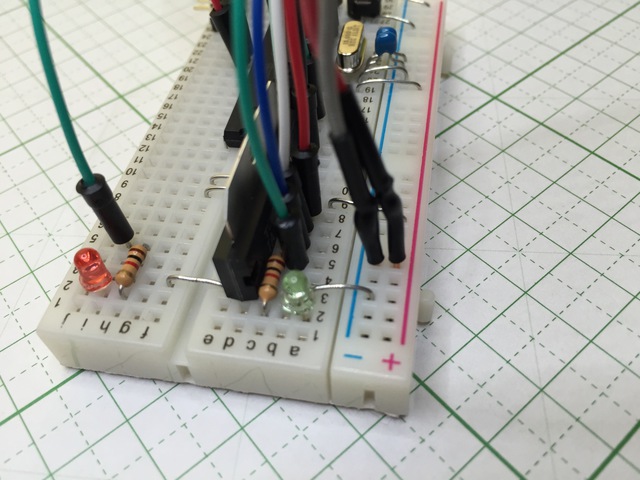
動作を確認するために、緑色のジャンパコードの一方(eの2)をブレッドボードから抜きます。
そして、「bの5」に挿します。
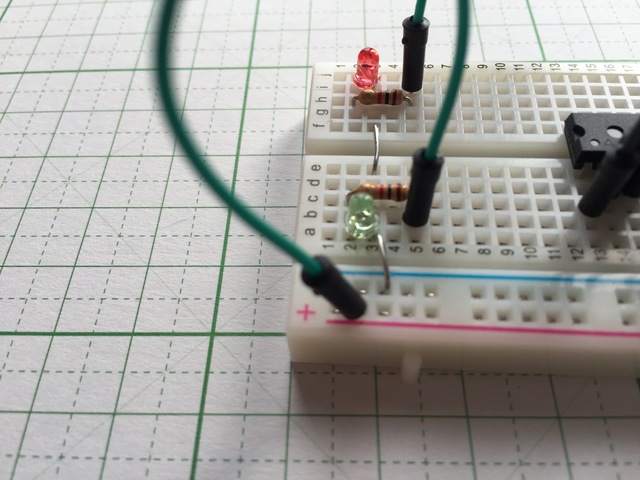
ここでUSBケーブルでコンピュータにつなぐと緑色のLEDが光るはずです。先程よりもずいぶん光が弱くなっているはずです。
光ることを確認したらコンピュータからUSBケーブルを抜いて、電源を切っておこう。
スモウルビーからコントロールできるように配線
動作を確認できたので、スモウルビーからコントロールできるように配線します。
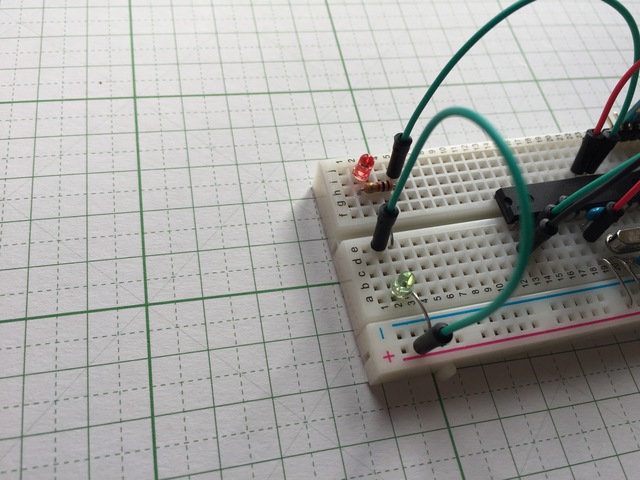
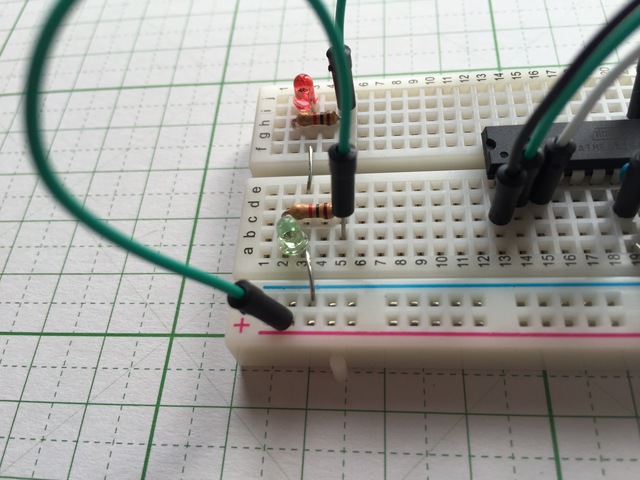
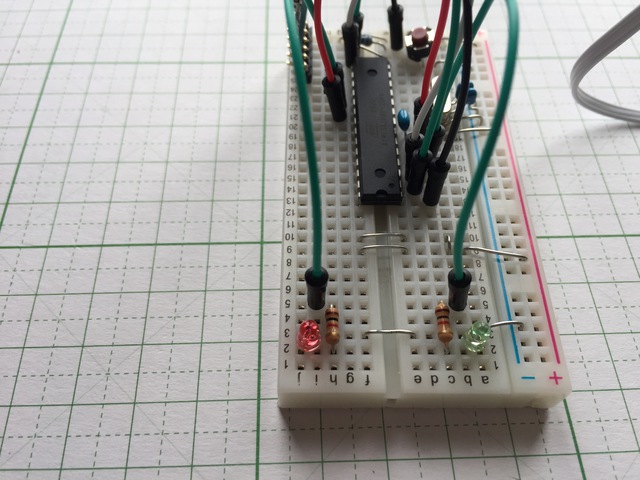
緑色のジャンパコードの一方(+)をブレッドボードから抜きます。
そして、「cの16」に挿します。
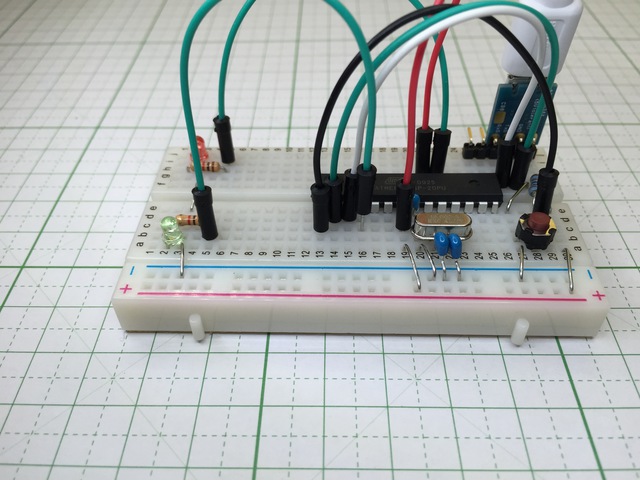
これで緑色のLEDに関する配線は完了です。
動作確認
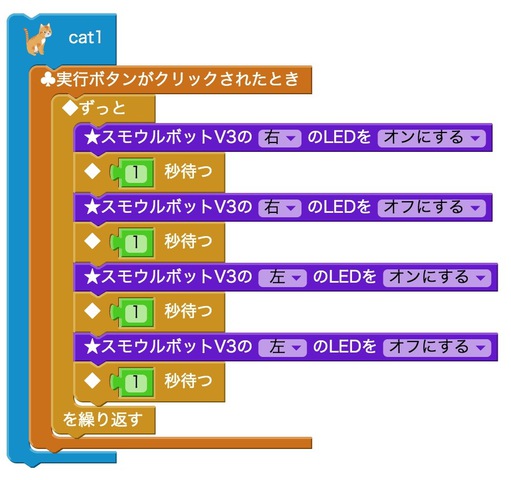
スモウルビーを操作して、下のプログラムを作って実行してみましょう。
(4) モーター、車輪の取り付け
さて、ようやくですが、モーターや車輪を取り付けて車型に仕上げます。
モーターを制御するための配線
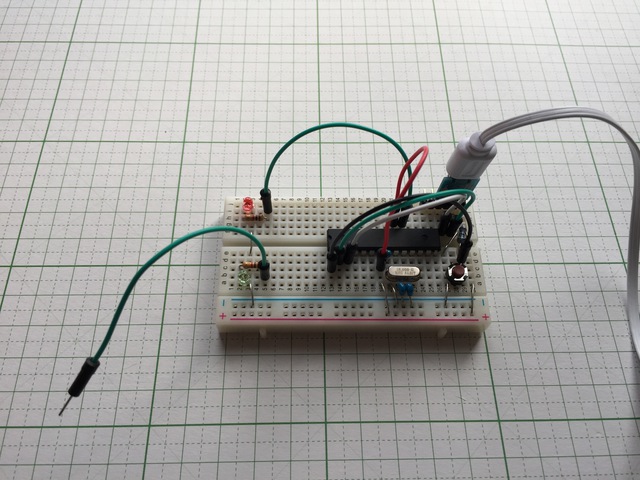
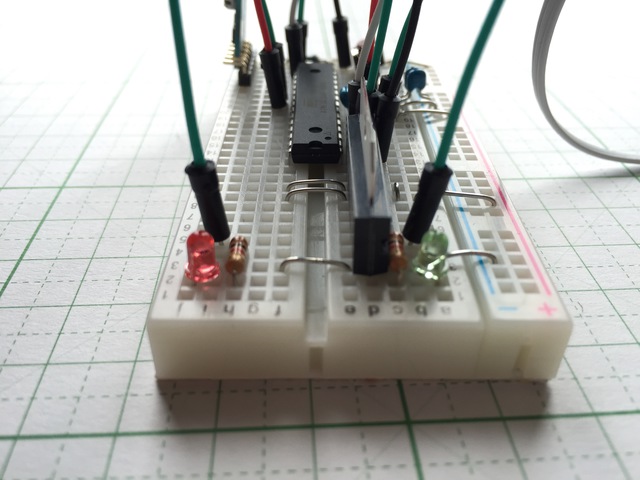
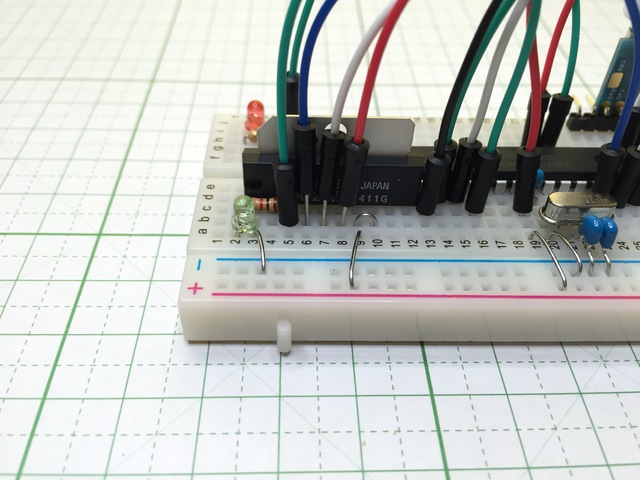
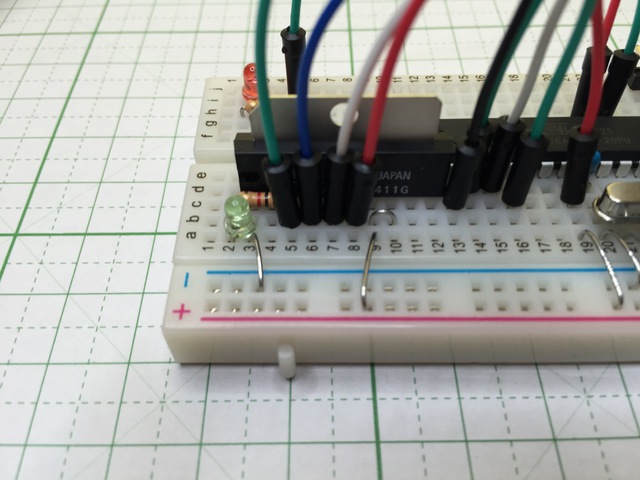
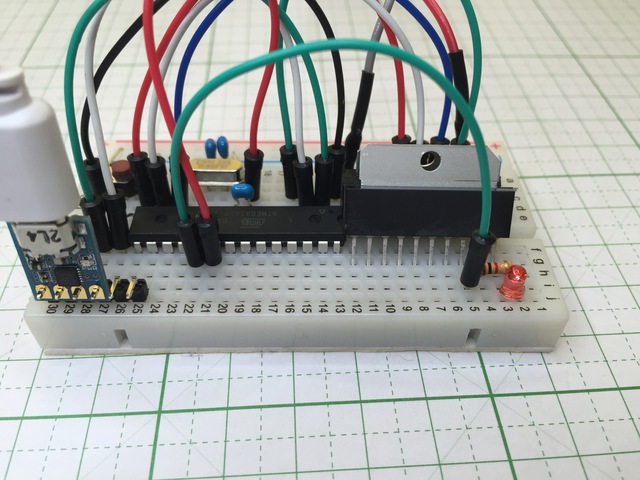
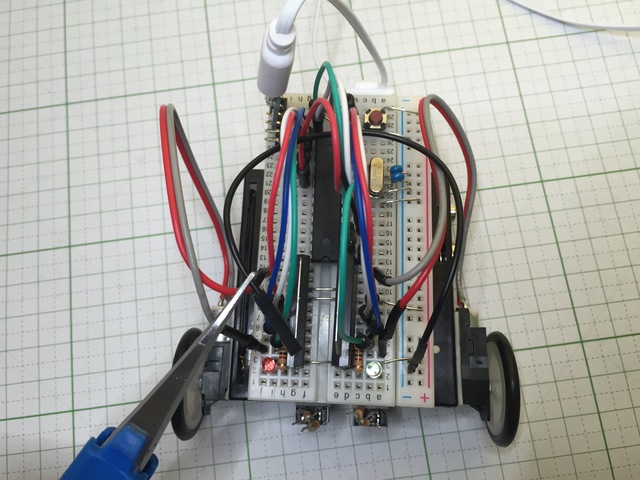
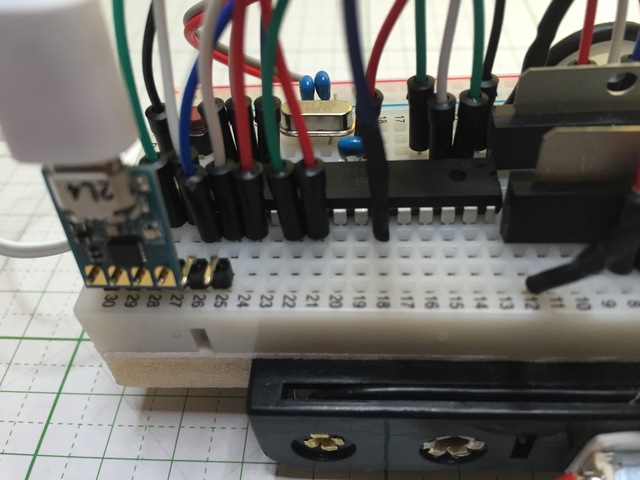
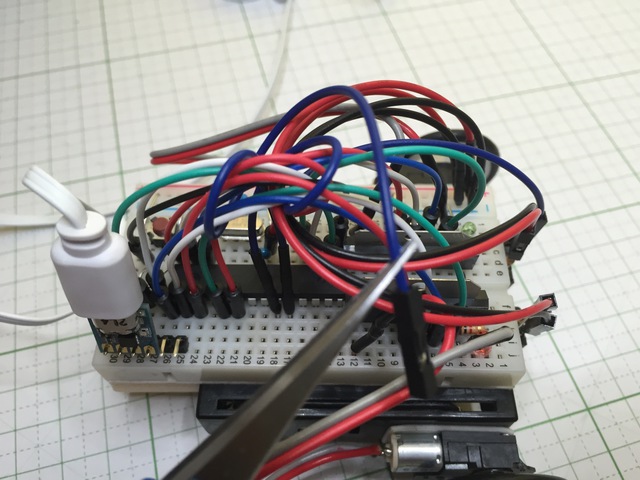
まずは、モーターを制御するための配線を写真の赤い線のようにします。
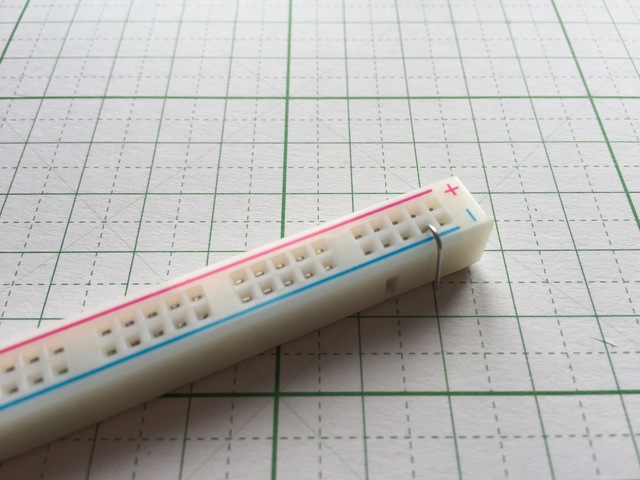
切り離したブレッドボードの端から3番目の穴を使って金属線を加工します。
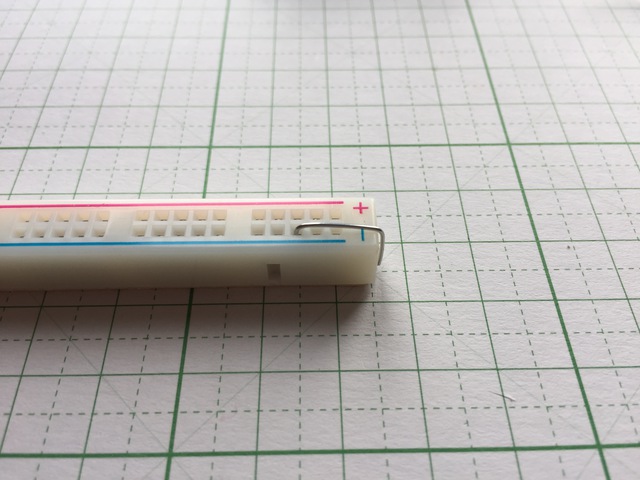
それをブレッドーボードの「+」と「aの9」に挿します。
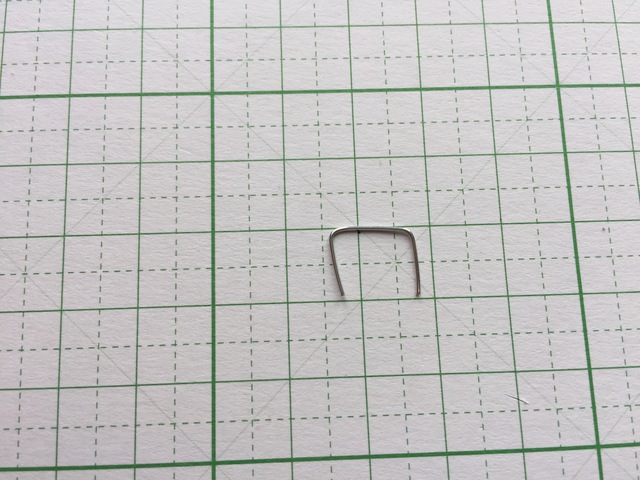
次に切り離したブレッドボードの「ー」側の端を使って写真のように金属線を加工します。
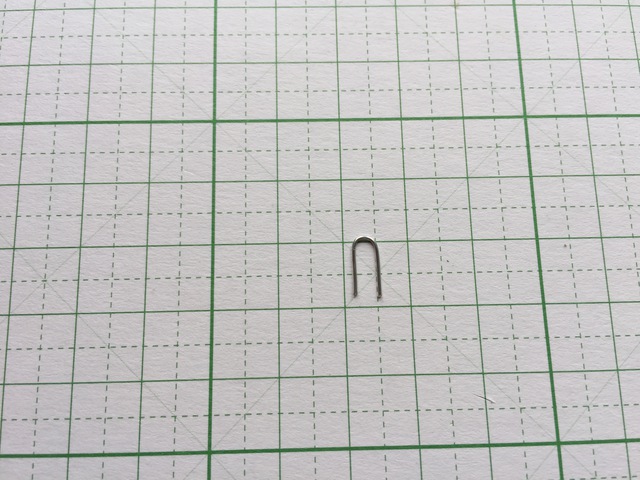
それをブレッドーボードの「bの9」と「bの10」に挿します。
次に切り離したブレッドボードの端から2番目の穴を使って金属線を加工します。
それをブレッドーボードの「eの10」と「fの10」に挿します。
もう一つ、切り離したブレッドボードの端から2番目の穴を使って金属線を加工します。
それをブレッドーボードの「eの9」と「fの9」に挿します。先ほど挿したところの一つ前です。
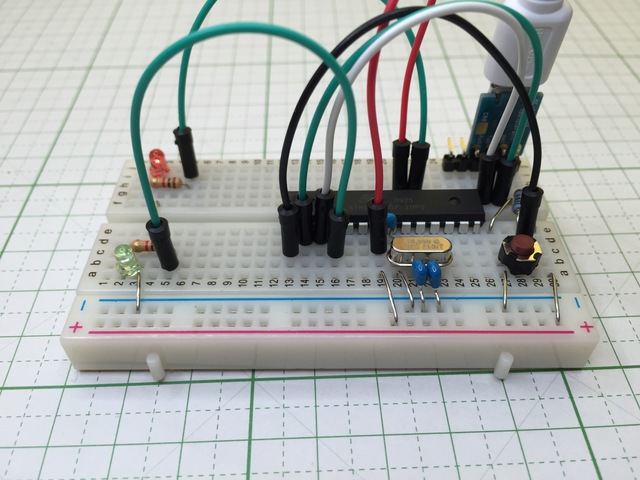
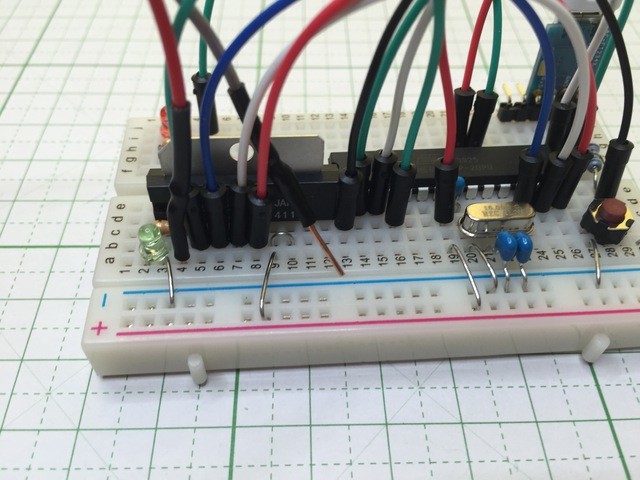
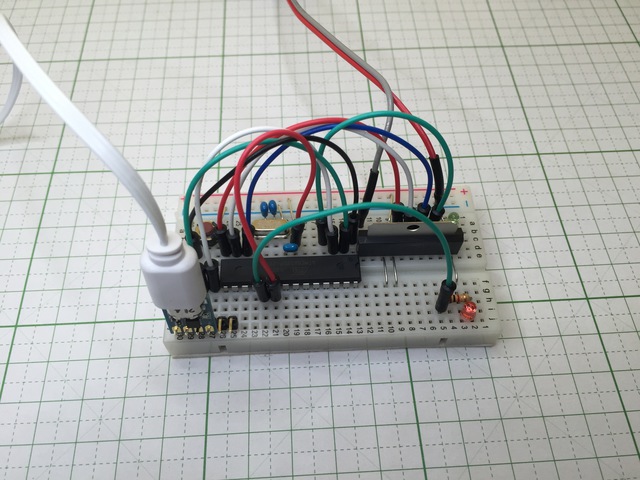
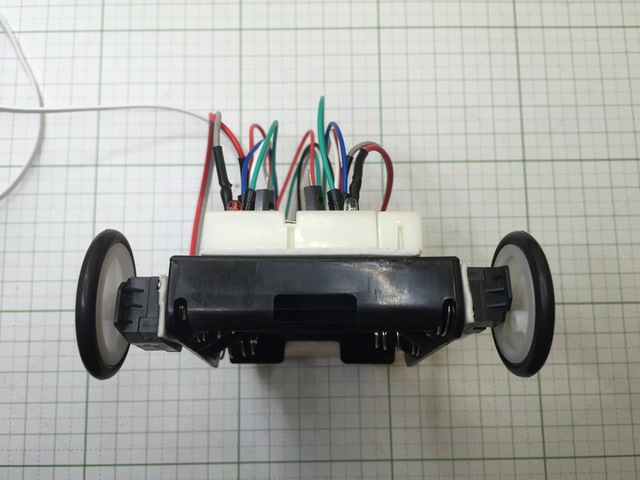
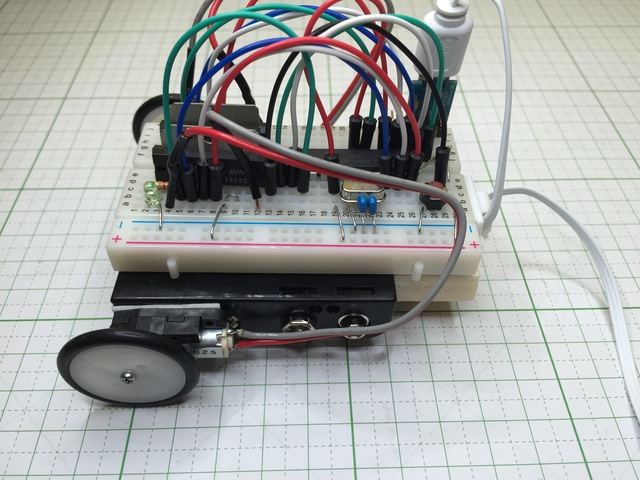
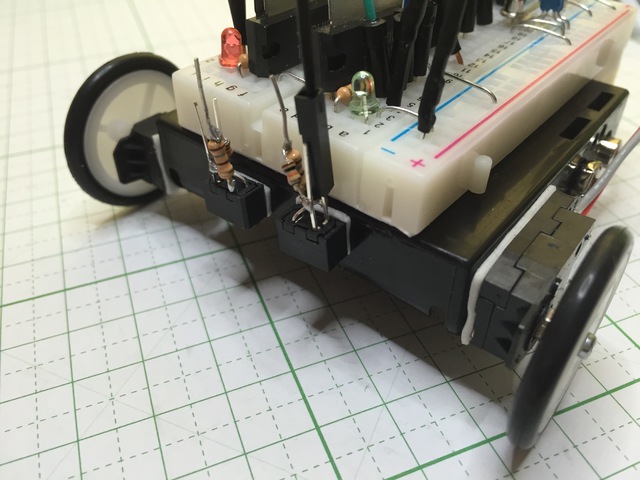
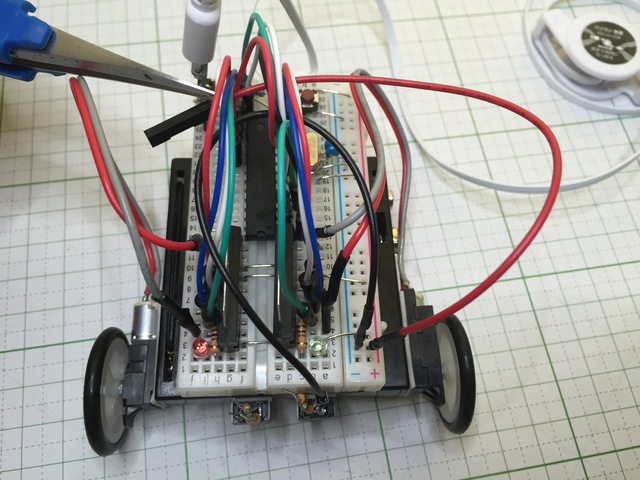
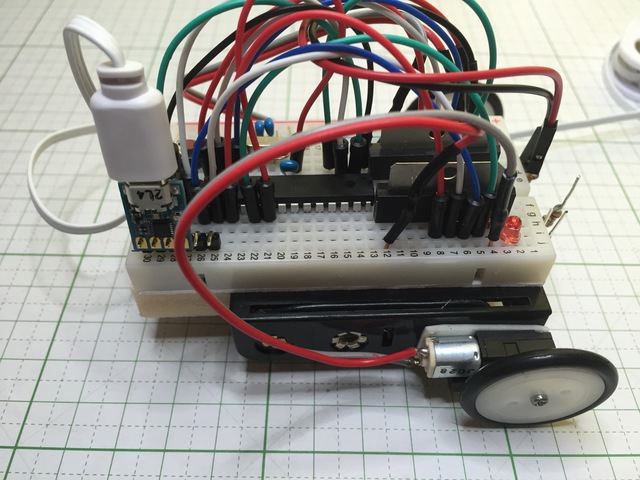
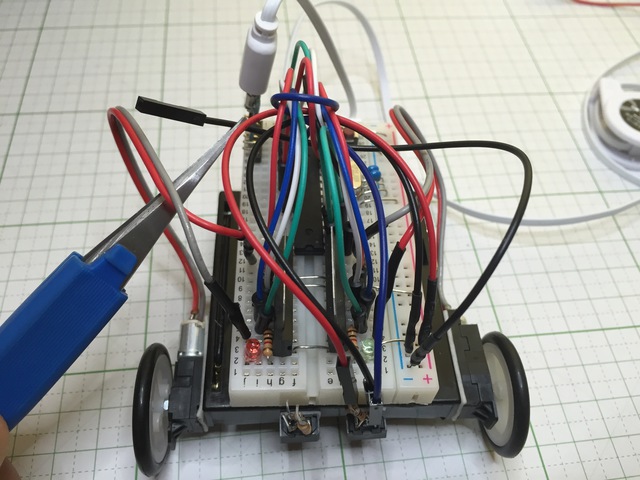
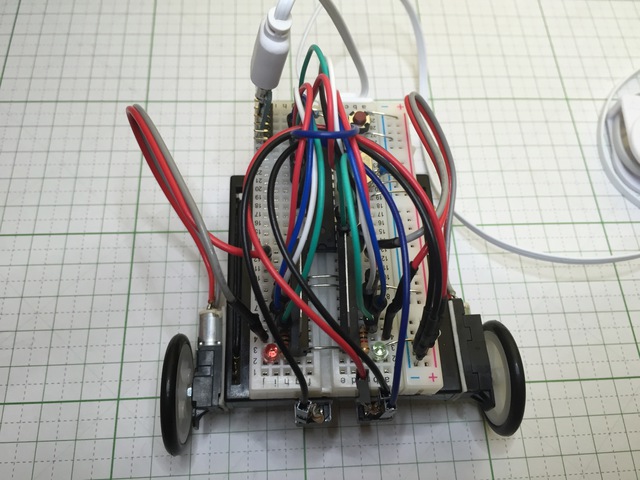
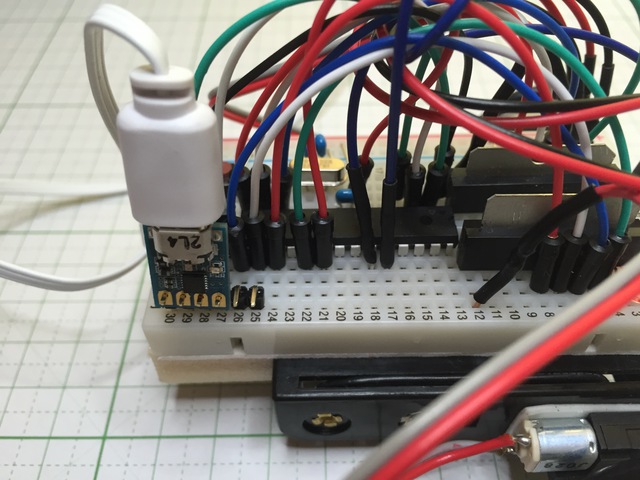
これで配線が終わりました。上からみると写真のような感じです。
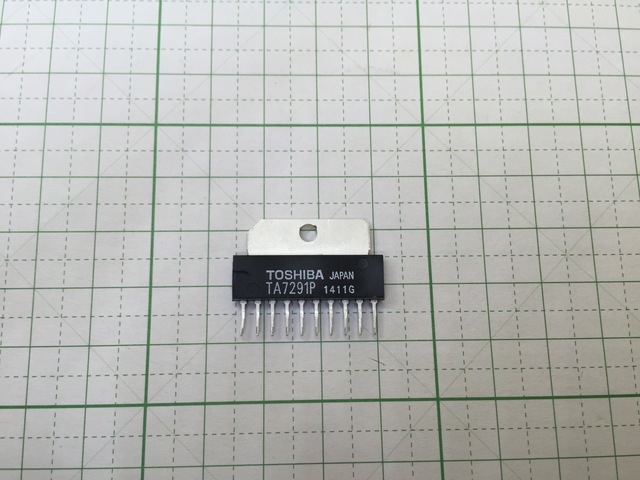
左のモータードライバの取り付け
次にモーターの回転を制御して、車を前に進めたり、戻したりするための「モータードライバ」というものを取り付けます。これは各モーターに必要です。スモウルボットV3はモーターを2つ使いますので、モータードライバは2つ使います。

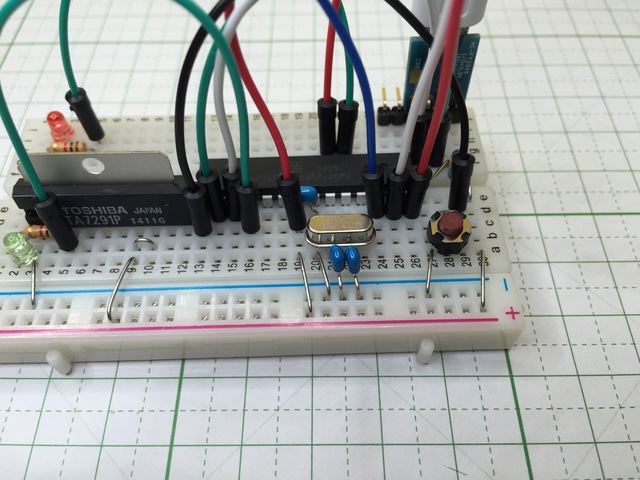
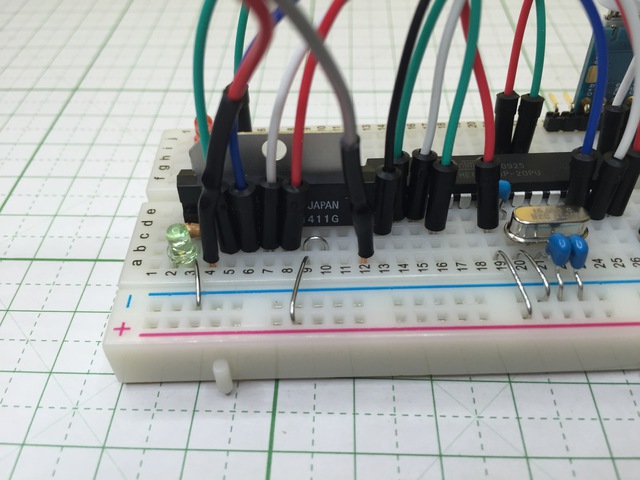
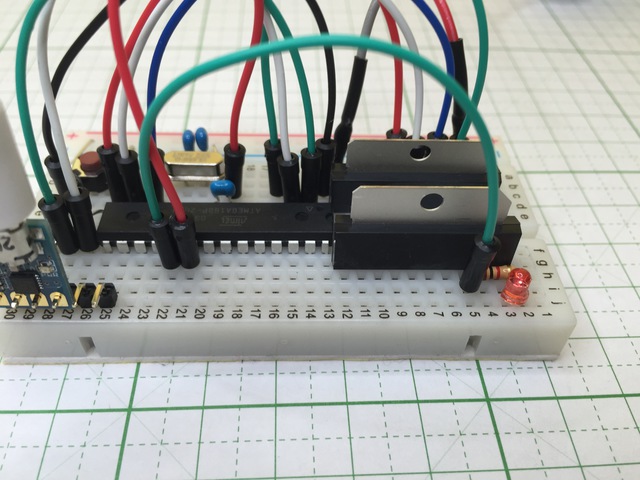
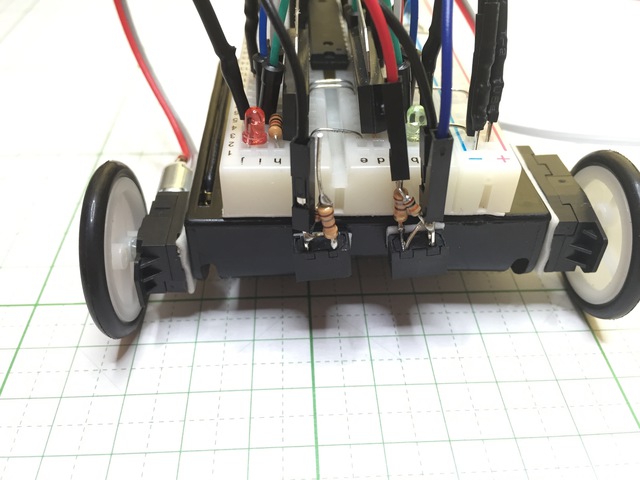
2つのモータードライバはどちらも同じものです。ここでは、そのうちをひとつを写真のようにブレッドボードの「dの3」から「dの12」に挿します。
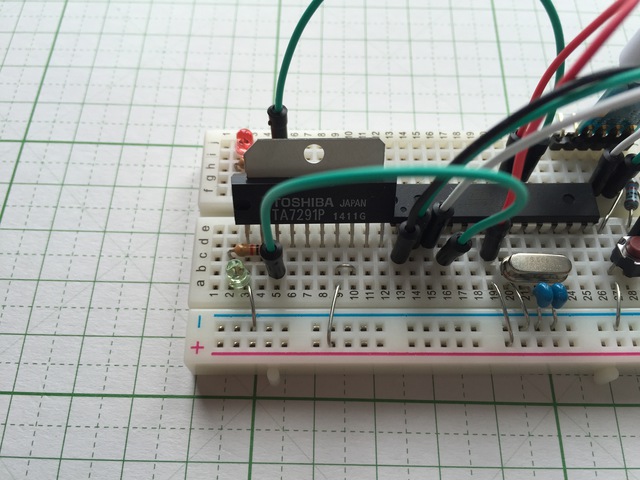
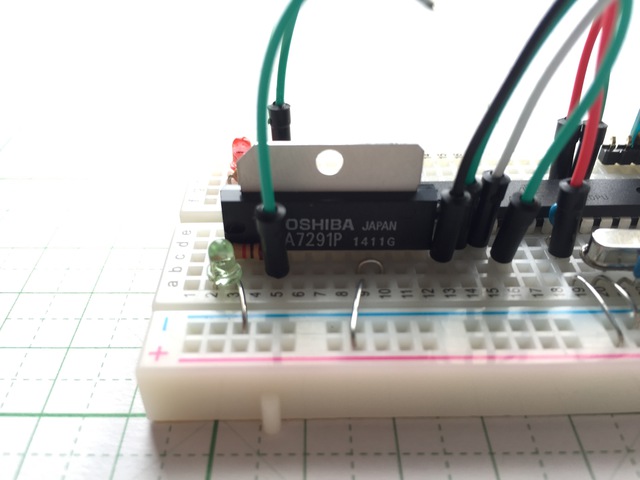
少し硬くて挿しにくいかもしれませんが、写真のようにしっかりと奥まで差し込みます。
左のモータードライバとArduino部分の配線
モータードライバとArduino部分を配線してスモウルビーからモーターを回転させたり、逆転させたりできるようにします。
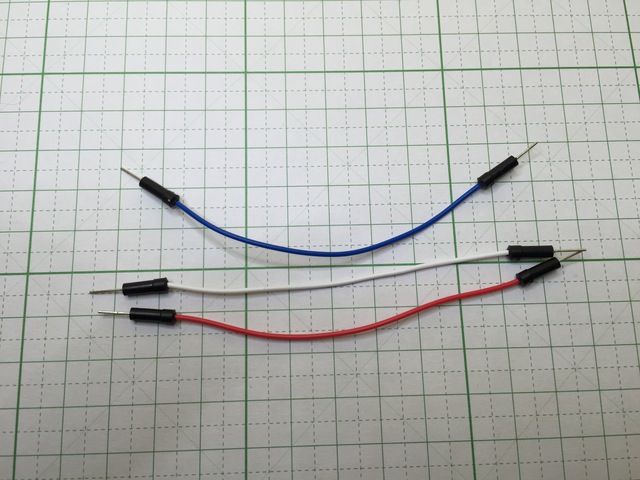
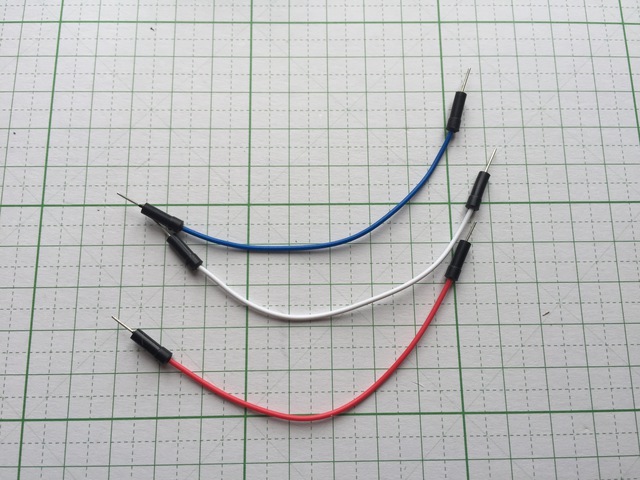
青・白・赤の3本のジャンパケーブルを使います。
青・白・赤のジャンパケーブルのそれぞれの一方を順番にブレッドボードの「dの24」「dの25」「dの26」に挿します。
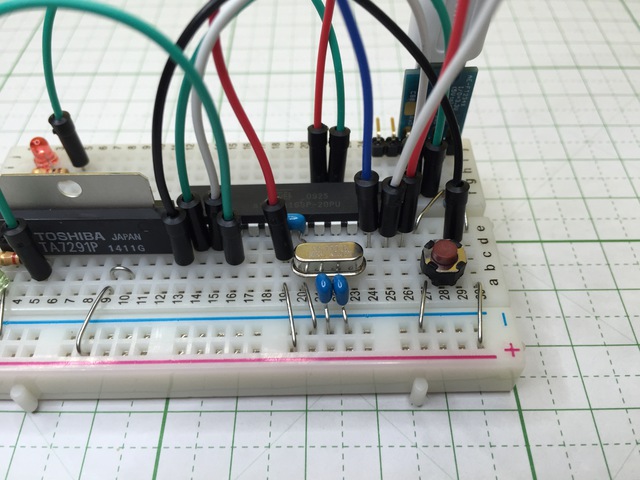
次に青・白・赤のジャンパケーブルのそれぞれのもう一方を順番にブレッドボードの「bの6」「bの7」「bの8」に挿します。
これで、あとはモーターを取り付けるだけです。
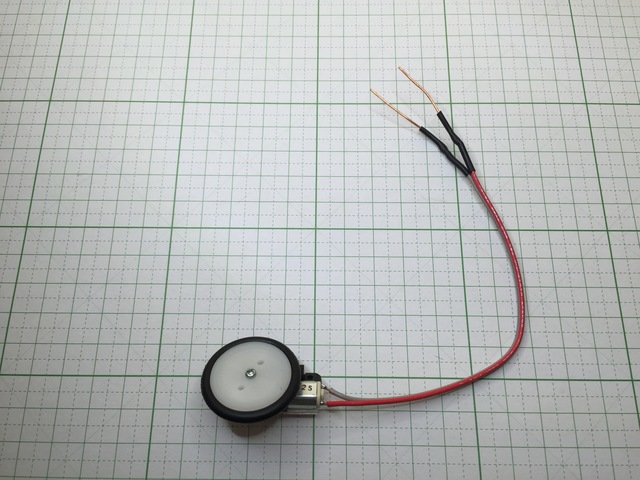
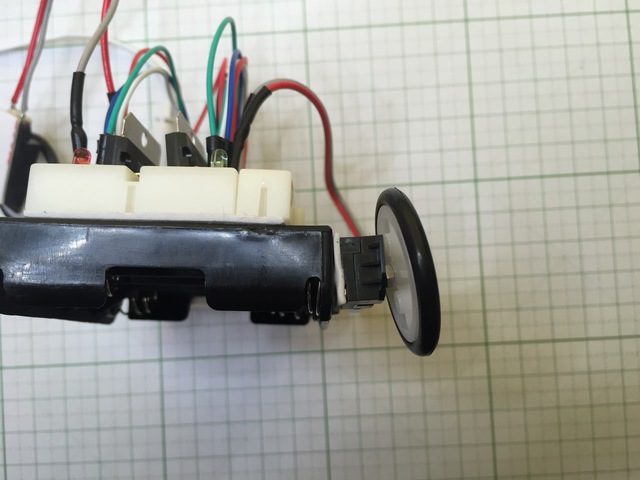
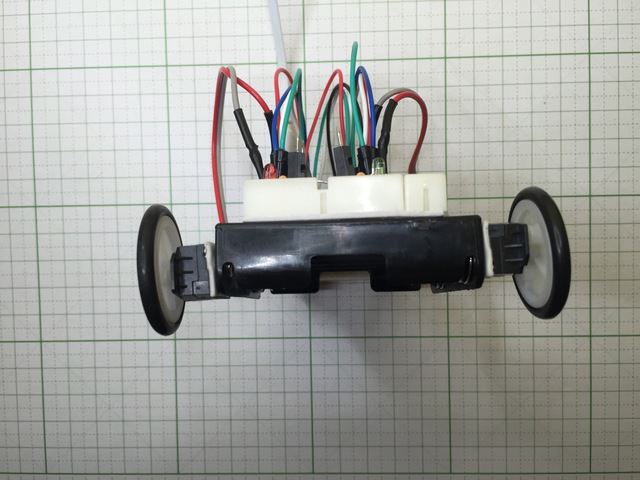
左のモーターの取り付け
次にモーターを取り付けます。2つのモーターはどちらも同じものです。ここでは、そのうちをひとつを取り付けます。
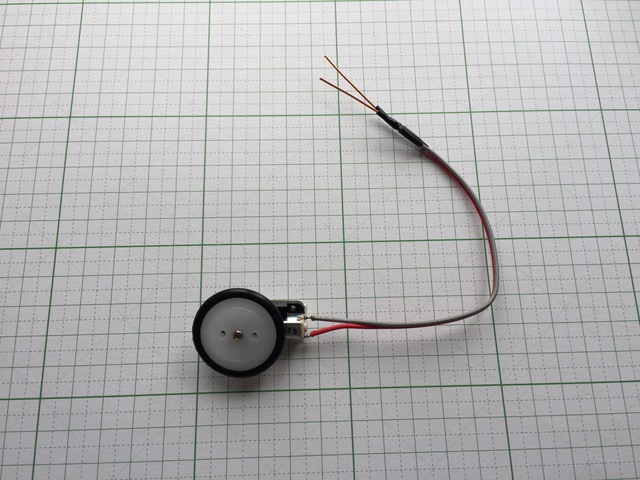
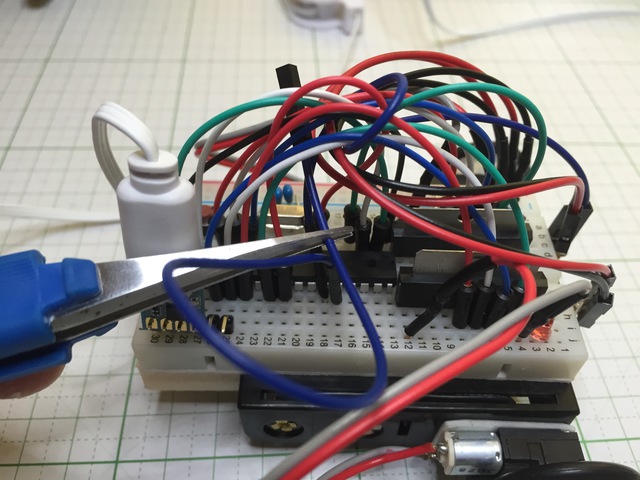
まずはニッパーと切り離したブレッドボードを使って、モーターのリード線をブレッドボードの高さと同じ長さにカットします。
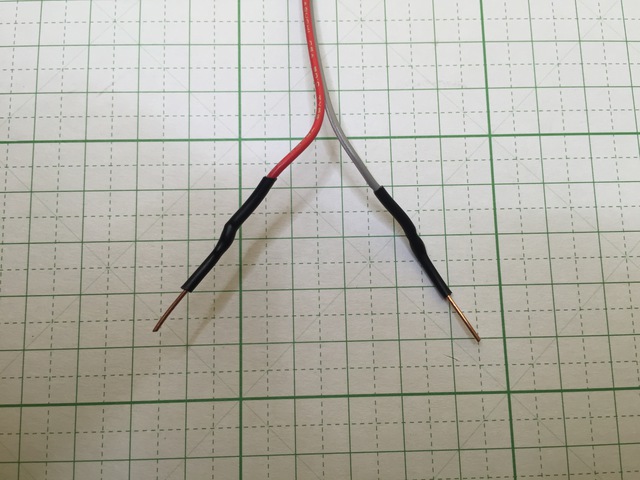
次に赤色と灰色の線のくっついているところを左右にひっぱって、1cm程度さきます。
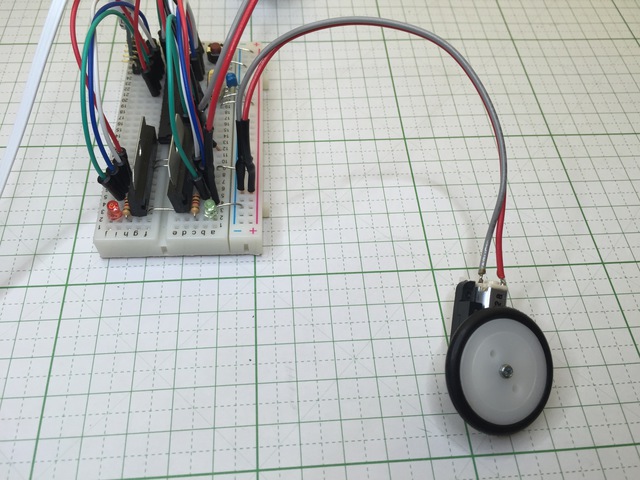
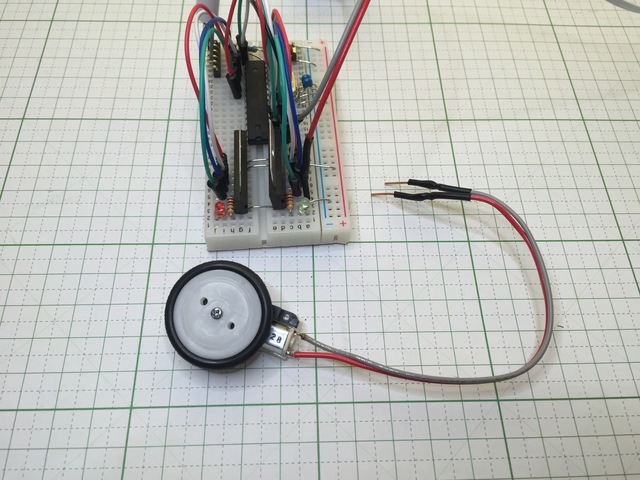
ここでモーターとモータードライバにつなぐまえに、モーターが正しく動くか確認してみましょう。
モーターの赤色の線をブレッドボードの「+」に、灰色の線を「ー」に挿します。
そして、コンピュータとUSBケーブルを接続すると下の動画のようにモーターが回転するはずです。動作を確認できたら、USBケーブルは抜いておきます。
もし正しく動作しなければモーターが故障している可能性がありますので、キットの購入元にお問い合わせください。
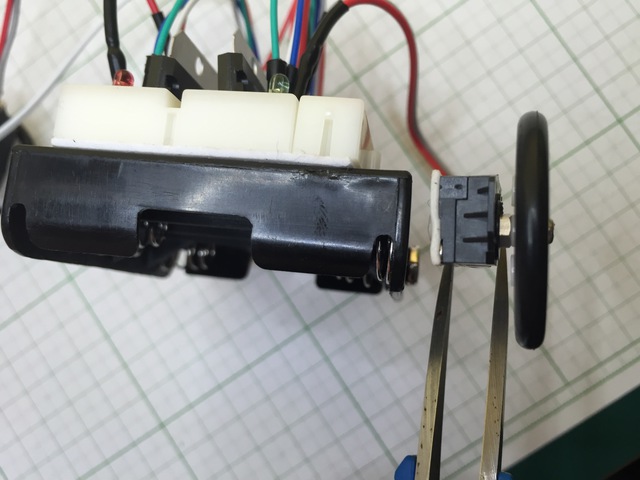
モーターそのものは正しく動作することを確認できたら、いったんモーターをブレッドボードから抜きます。
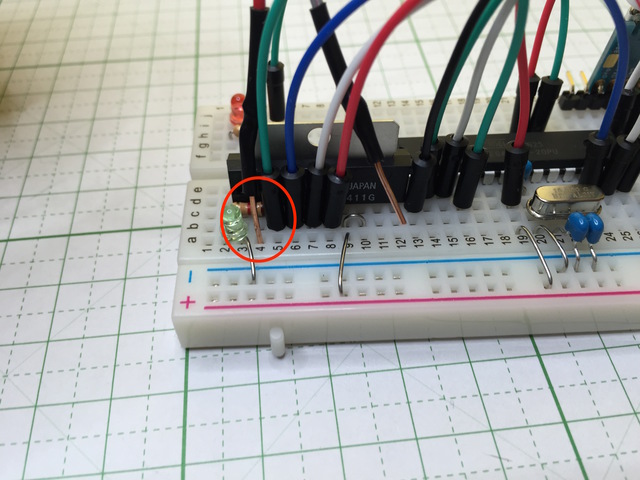
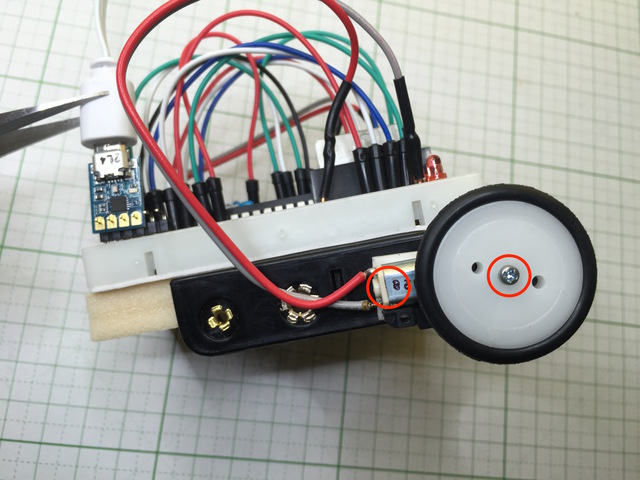
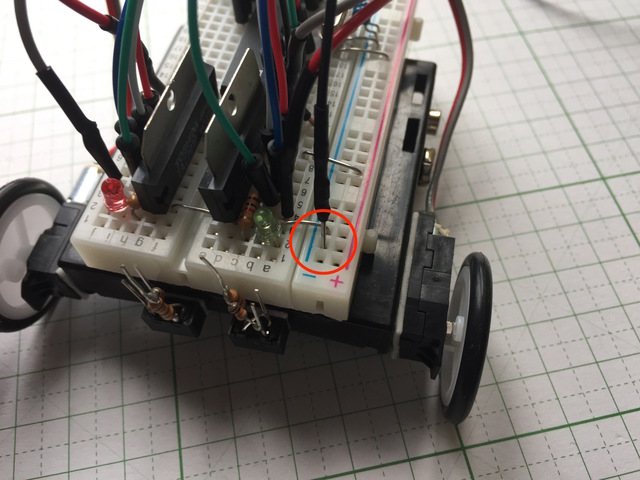
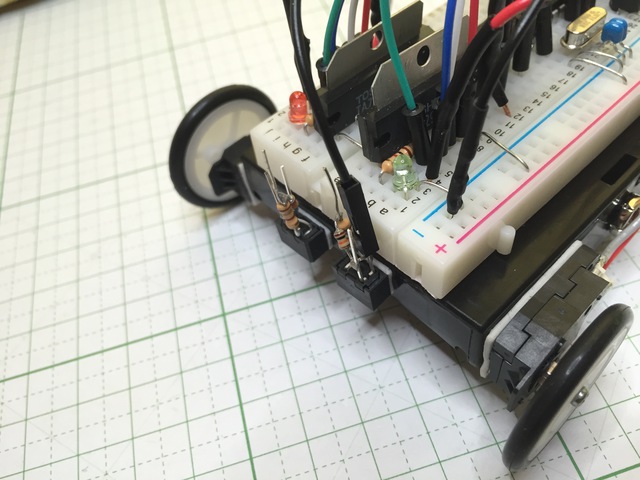
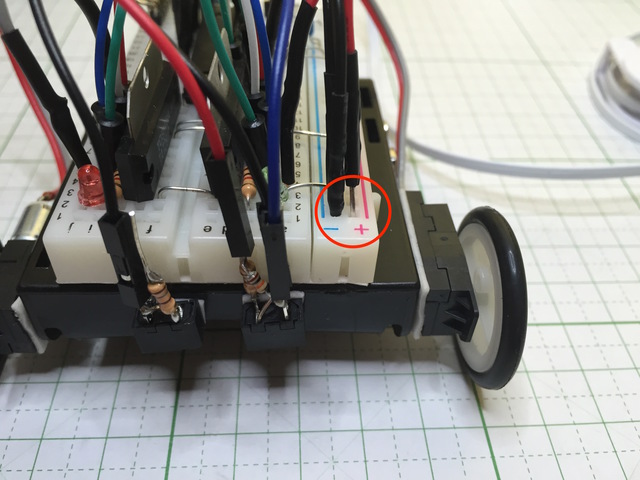
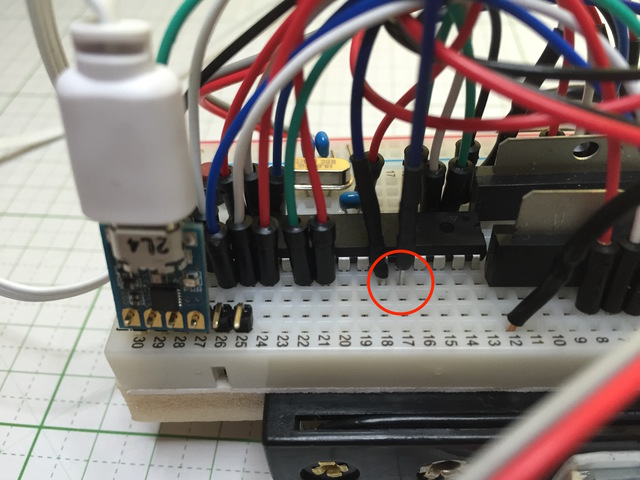
そして、写真の赤い丸の部分のように、モーターの赤色の線をブレッドボードの「aの4」に挿します。
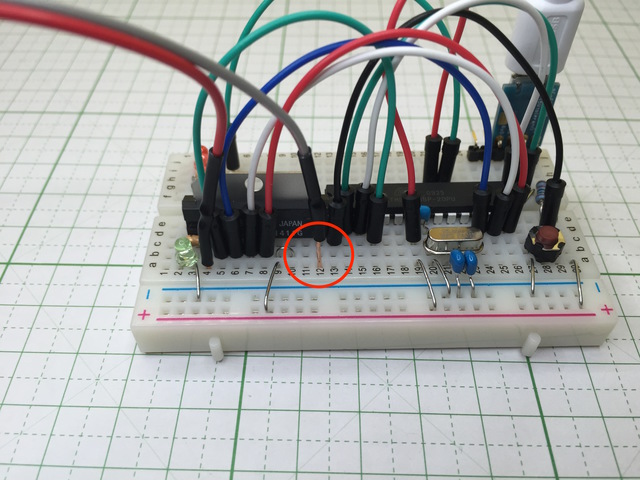
次に写真の赤い丸の部分のように、モーターの灰色の線をブレッドボードの「aの12」に挿します。
これでモーターを取り付けることができました。
左のモーターの動作確認
まだ一方(左側)のモーターしか取り付けていませんが、スモウルビーから制御できることを確認してみましょう。
コンピュータとUSBケーブルを接続してから、スモウルビーを操作して下のプログラムを作って実行します。
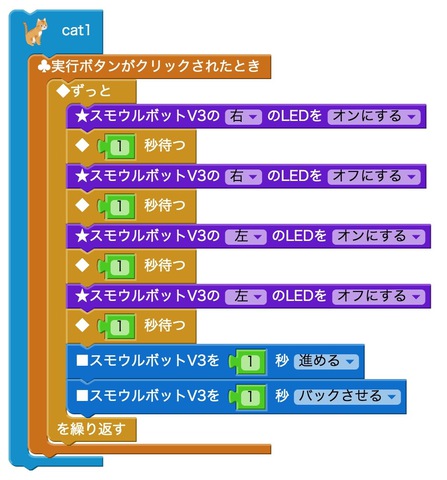
すると、下の動画のように、2つのLEDが点灯・消灯した後にモーターが回転・逆転するはずです。
動作を確認できたらUSBケーブルを抜きます。
右のモーターの取り付け
もう一方(右側)のモーターも同じように取り付けます。
作業しやすいようにブレッドボードを水平方向にくるっと回転させて、「j」側を手前にもってきます。
もうひとつのモータードライバを取り付けます。
ブレッドボードの「gの3」から「gの12」に挿します。写真のようにモータードライバの何も書かれていない面を手前にします。反対向きに挿してしまうと動作しませんので注意してください。
これも先ほどと同じように奥まで挿します。
次に青・白・赤の3本のジャンパケーブルを使います。
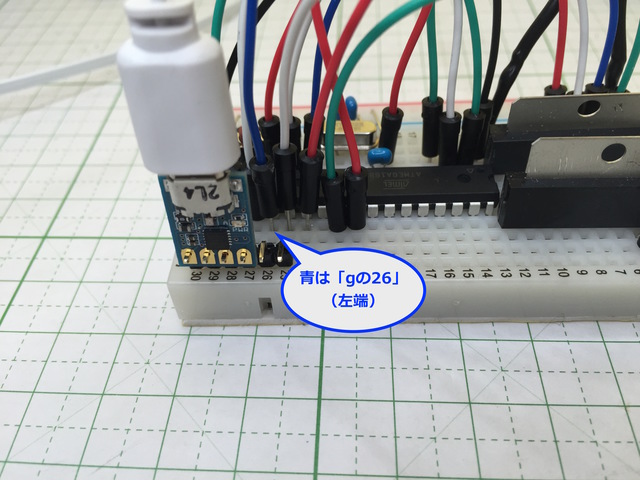
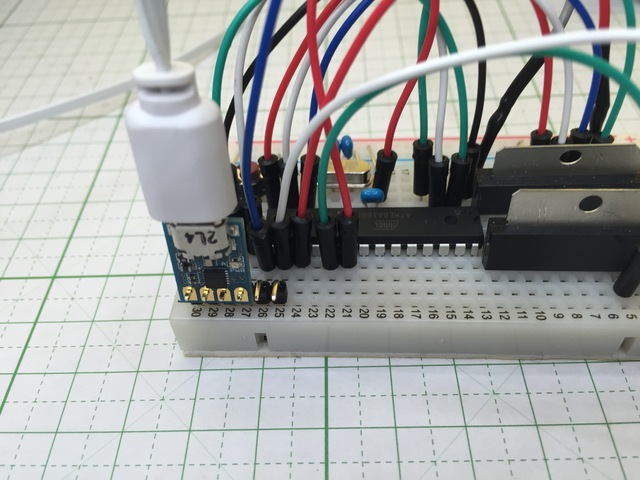
青・白・赤のジャンパケーブルのそれぞれの一方を順番にブレッドボードの「gの26」「gの25」「gの24」に挿します。青と赤を反対にしてしまうことがよくありますので、写真をよくみて作業してください。
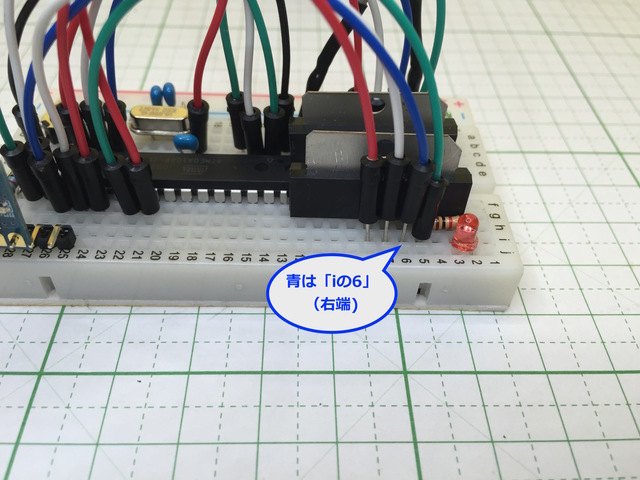
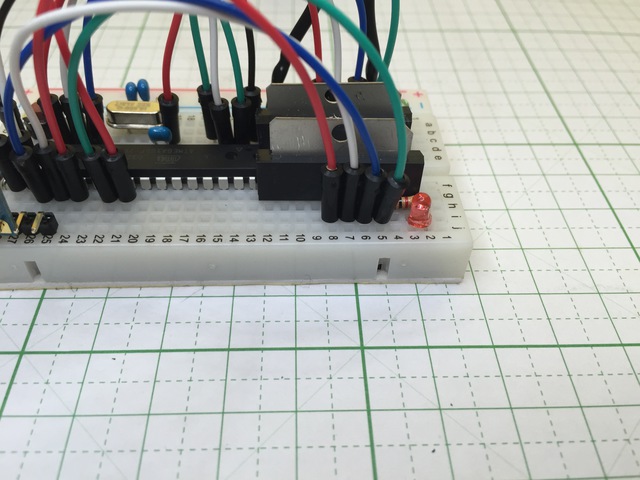
次に青・白・赤のジャンパケーブルのそれぞれのもう一方を順番にブレッドボードの「iの6」「iの7」「iの8」に挿します。ここでも青と赤を反対にしてしまうことがよくありますので、写真をよくみて作業してください。
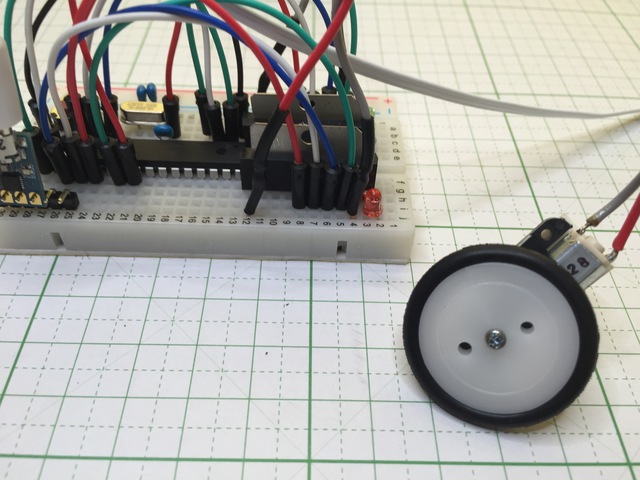
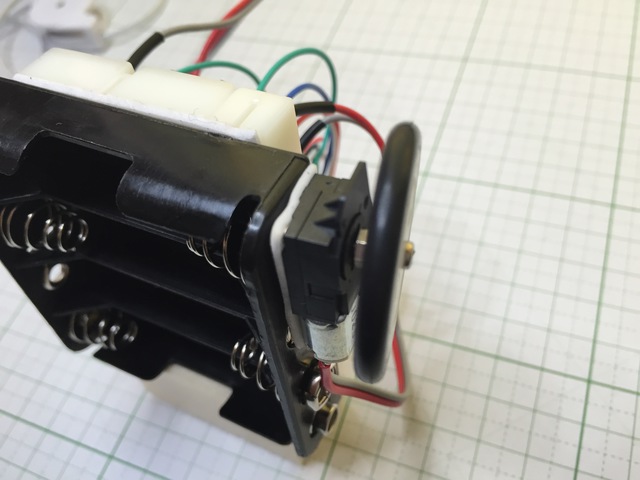
もう1つのモーターを取り付けます。
さきほどと同じようにリード線を短くカットして、赤色と灰色の線がつながっているところを1cm程度さきます。
このモーターも、モータードライバに接続する前にモーターそのものが正しく動くことを確認しておきます。
モーターの赤色と灰色のリード線を、それぞれブレッドボードの「+」と「ー」に挿します。
そして、コンピュータとUSBケーブルを接続すると先ほどと同じようにモーターが回転するはずです。
ここでも、正しく動作しなければモーターが故障している可能性がありますので、キットの購入元にお問い合わせください。
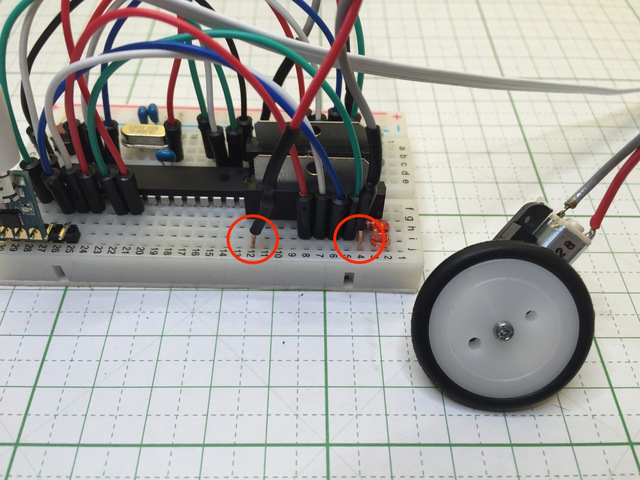
動作確認ができたらブレッドボードからモーターを抜きます。
そして、モーターの赤色と灰色のリード線を、それぞれブレッドボードの「jの12」と「jの4」に挿します。ここでも挿す穴を間違えやすいので、写真をよくみて作業してください。
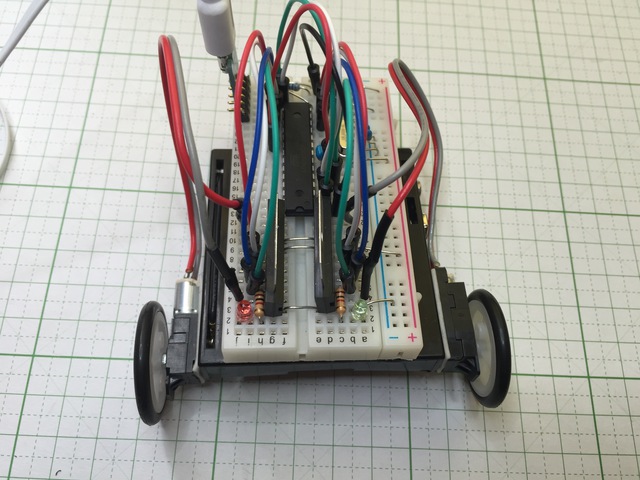
さて、左右のモーターを取り付けたので、スモウルビーから制御できることを確認してみましょう。
コンピュータとUSBケーブルを接続してから、スモウルビーを操作して、先ほどとまったく同じ下のプログラムを実行します。
すると、下の動画のように、2つのLEDが点灯・消灯した後に左右のモーターが回転・逆転するはずです。このとき左右のモーターが違う向きに回転していることを確認してください。つまり、左のモーターが回転しているならば、右のモーターは逆転しているはずです。
もし、同じ方向に回転してしまっている場合はモーターに関する配線が間違っている可能性があります。これまでの作業をよく見なおしてみてください。
動作を確認できたらUSBケーブルを抜きます。
ボディの取り付け
次に車のボディを取り付けます。
スモウルビーのボディは、電池を入れるための「電池ボックス」というもので代用しています。電池ボックスをボディにするというのは ちっちゃいものくらぶさん の ちびか〜 などで使われているアイデアです。電池ボックスは適度な大きさで、プラスチック製なので軽く、なにより今後、電池を使ってコンピュータとのケーブルは外して無線で動かすといったことも期待できます。

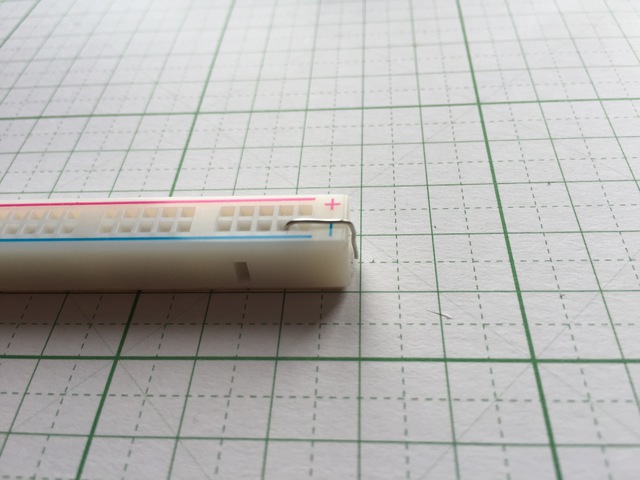
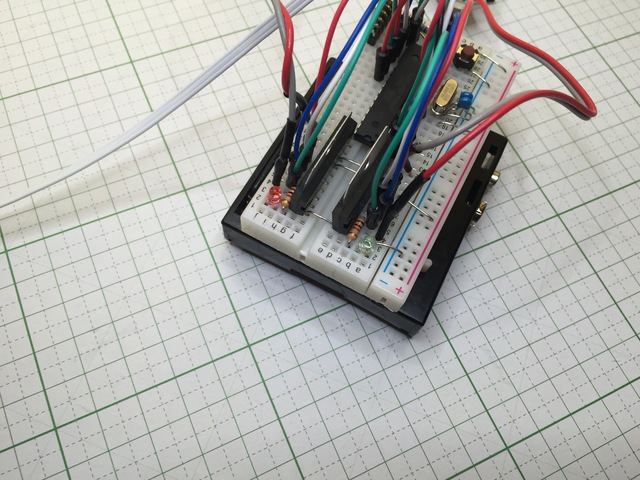
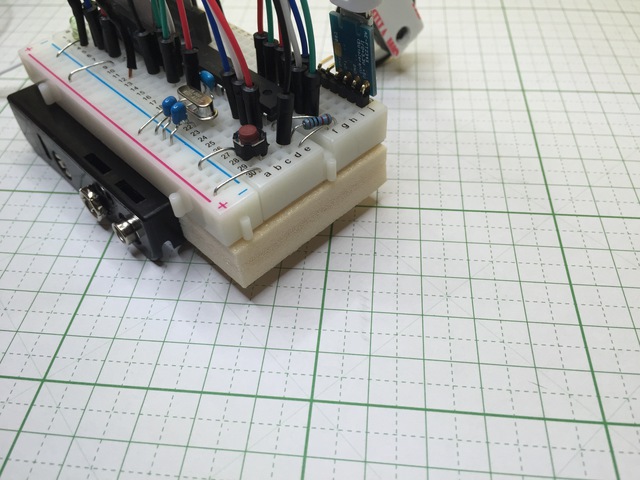
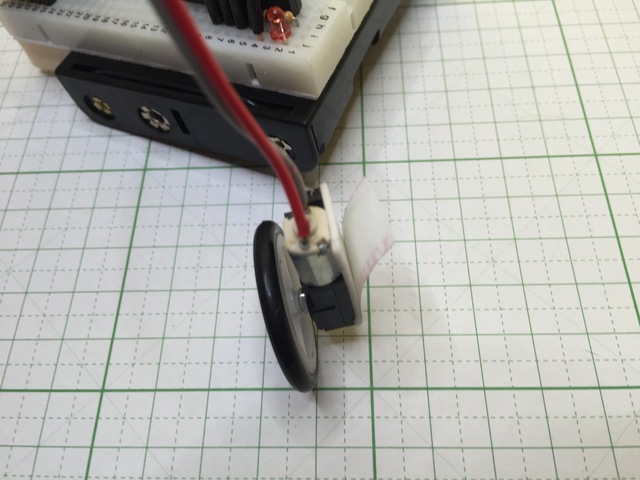
実はブレッドボードの裏側は強力な両面テープになっており、写真のように保護用の紙をはがすといろいろなものに貼り付けることができます。
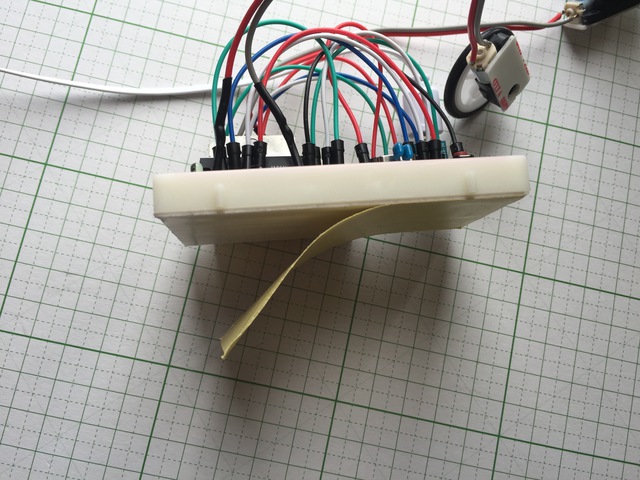
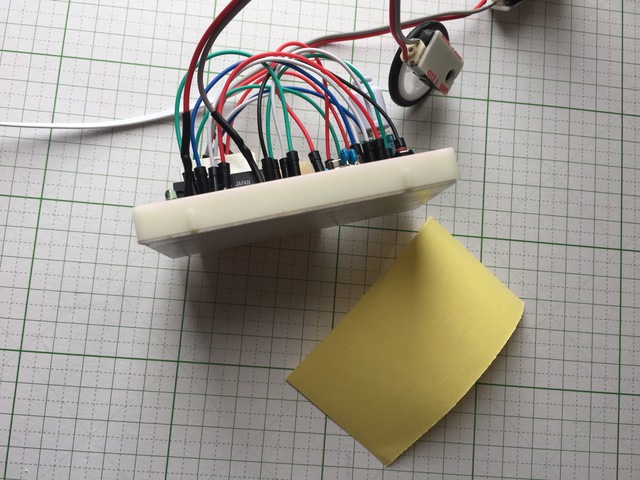
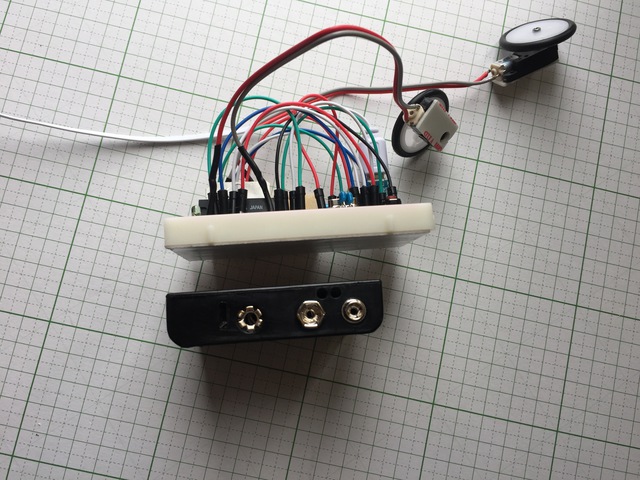
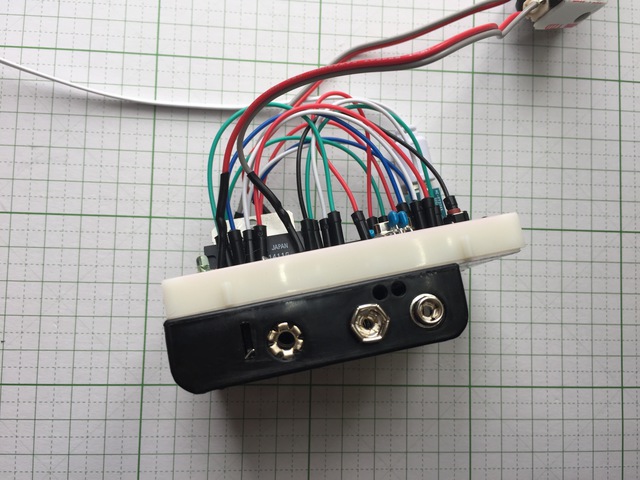
下の5枚の写真をよくみて、次の点に注意してブレッドボードと電池ボックスを貼り付けます。一度貼り付けるとなかなか外れないので注意してください。
- 電池ボックスは金属が出ているほうをブレッドボードの「+」側にする
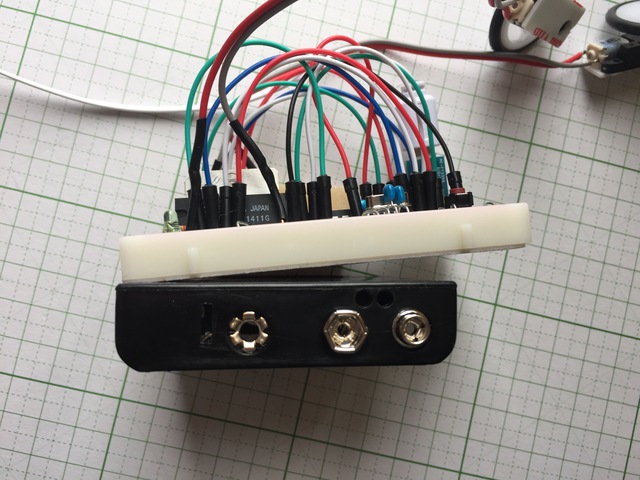
- 4枚目の写真のように電池ボックスがブレッドボードの「1」側の面にピッタリそろうようにする
- 4枚目の写真のようにブレッドボードは電池ボックスの真ん中にする
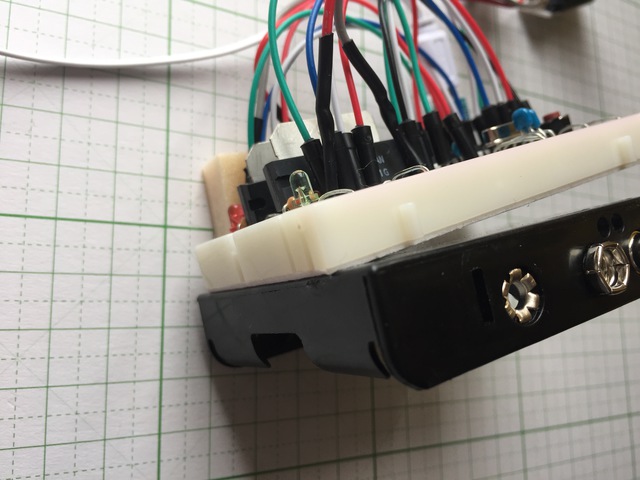
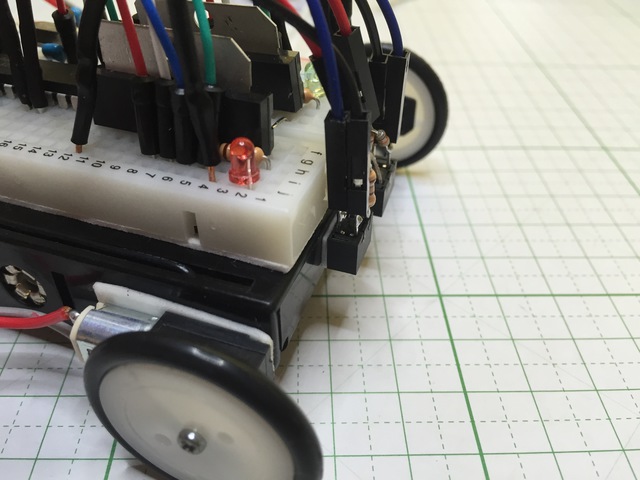
後輪の台座の取り付け
続いてブレッドボードの両面テープの余ったところに後輪の台座を取り付けます。できるだけ台座がブレッドボードからはみ出ないように貼り付けます。

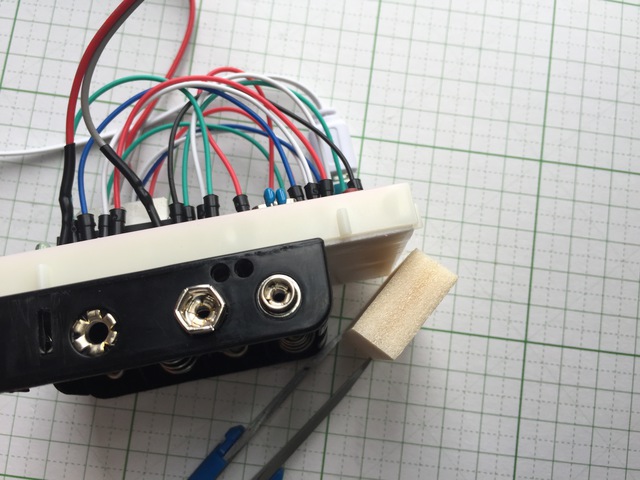
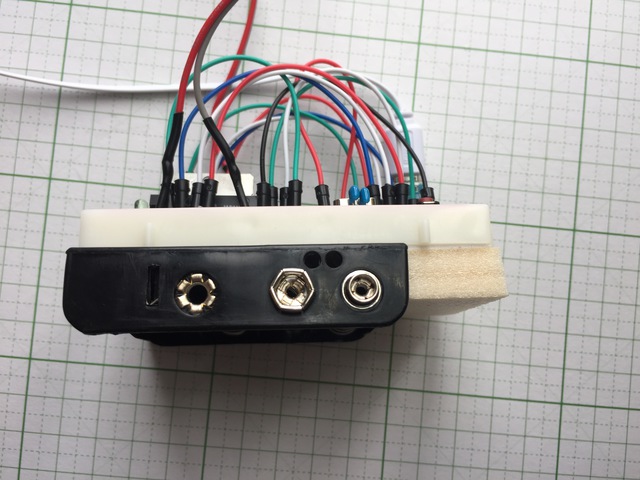
写真のように台座が大きいために後ろに少しはみ出してしまうこともありますが、問題ありませんのでそのままでいいです。もし気になる場合は、カッターではみ出た部分をカットしてください。
ボディへのモーターの取り付け
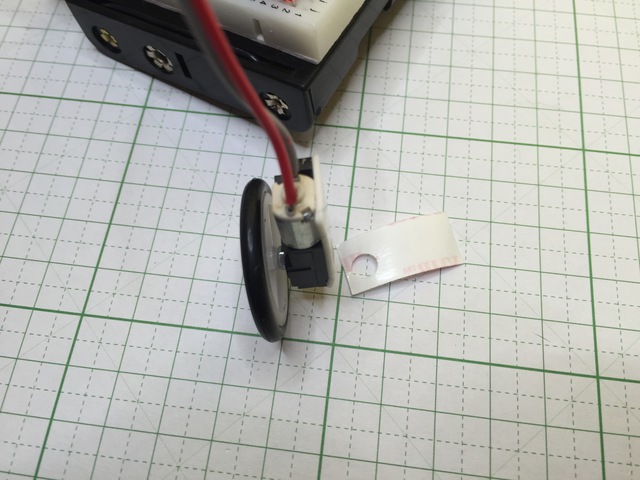
モーターもブレッドボードと同じように両面テープが貼ってありますので、保護用の紙を剥がして電池ボックスに貼り付けます。
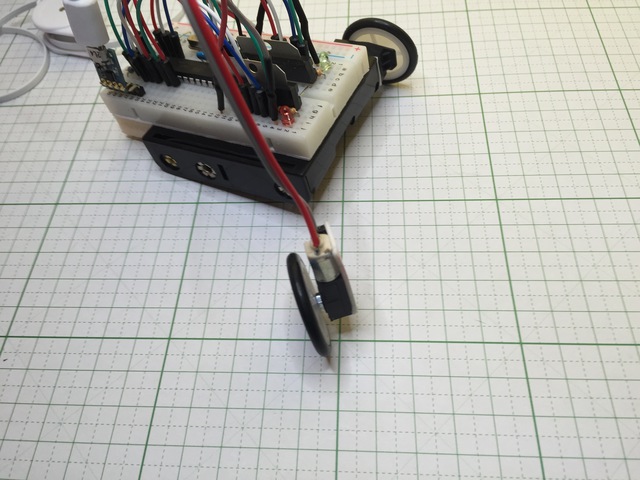
まずは左側のモーターです。下の7枚の写真をよくみて、ブレッドボードの「aの4」と「aの12」に挿した方のモーターを電池ボックスに貼り付けます。このとき次の点に注意します。
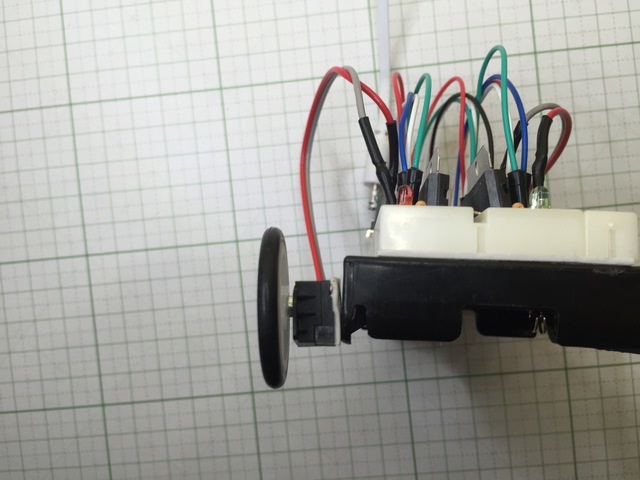
- 6枚目の写真ようにモーターが電池ボックスの前と上にピッタリそろうようにします。
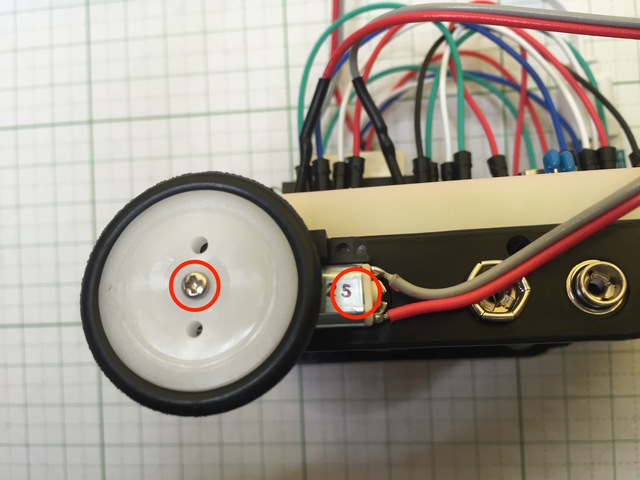
- タイヤの中心以外を強く押すと壊れますので、モーターと電池ボックスを貼り付けるときは7枚目の写真の赤い丸の部分を押します。
下の写真の赤い丸の部分を押します。それ以外の部分を押すとタイヤが外れることもありますので注意してください。
続いては右のモーターです。下の8枚の写真をよくみて、ブレッドボードの「iの4」と「iの12」に挿した方のモーターを電池ボックスに貼り付けます。このとき先ほどと同じように次の点に注意します。
- 4枚目と5枚目の写真のようにモーターが電池ボックスの前と下にピッタリそろうようにします。
- タイヤの中心以外を強く押すと壊れますので、モーターと電池ボックスを貼り付けるときは7枚目の写真の赤い丸の部分を押します。
下の写真の赤い丸の部分を押します。それ以外の部分を押すとタイヤが外れることもありますので注意してください。
後輪の取り付け
後輪を台座の真ん中に両面テープで貼り付けます。

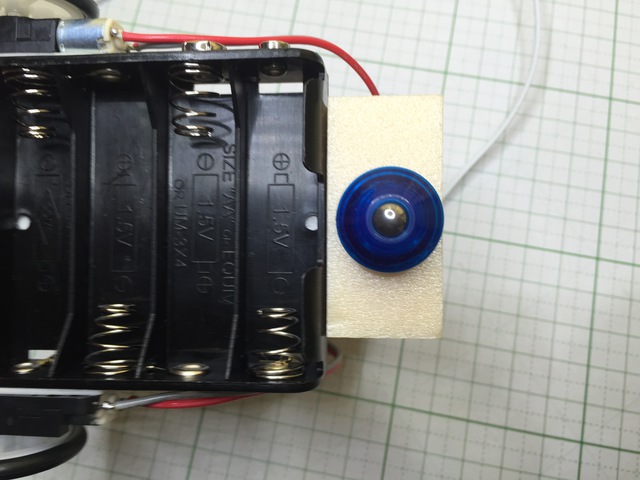
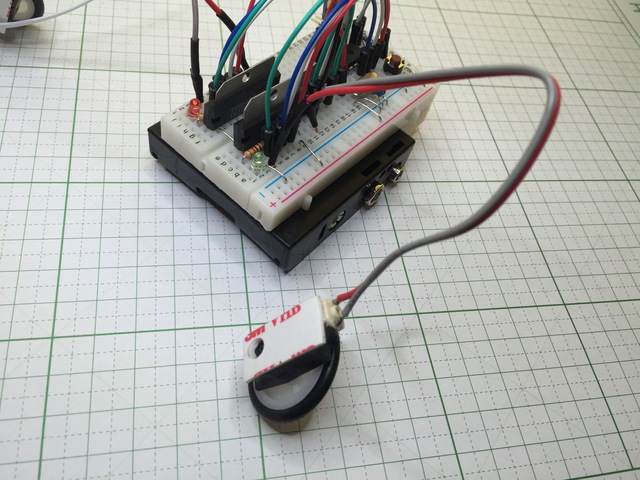
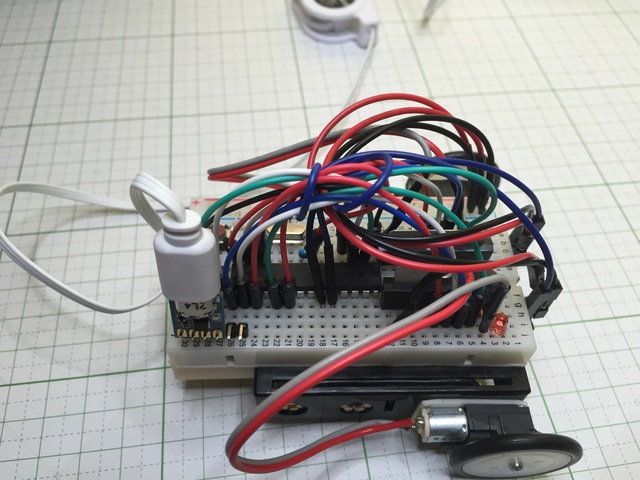
ケーブルフックの取り付け
USBケーブルをはさむためのケーブルフックを両面テープで貼り付けます。
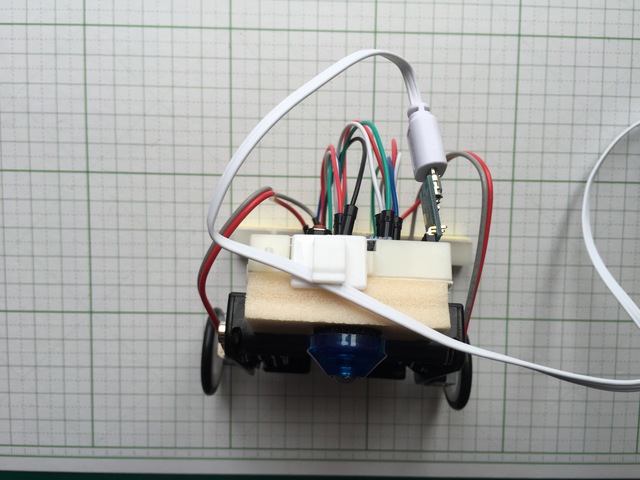
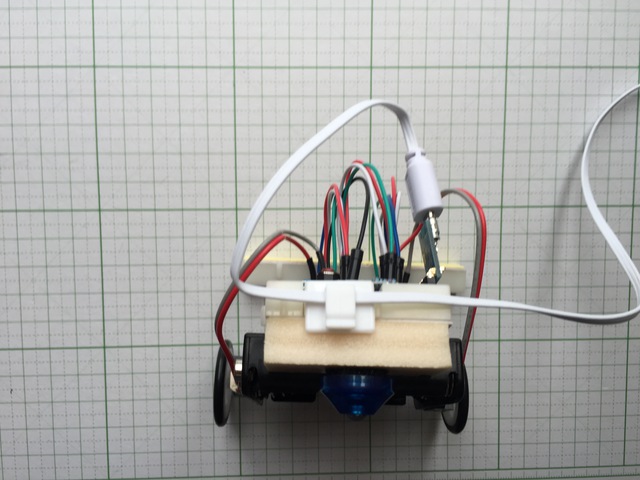
下の4枚目と5枚目の写真をよく見て、後輪側に貼り付けます。モーターを貼り付けた側に貼り付けないように注意してください。
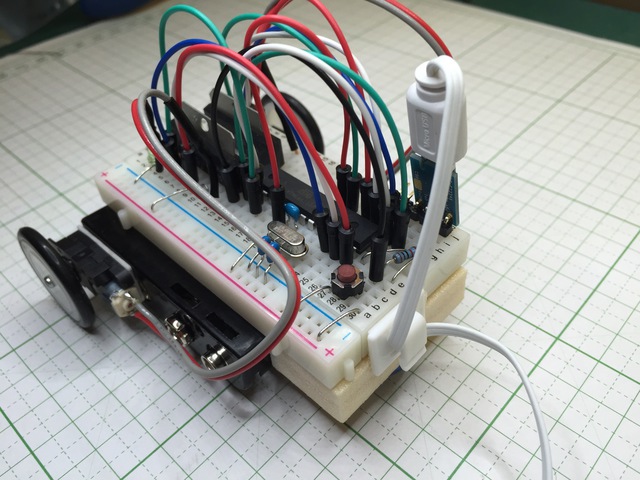
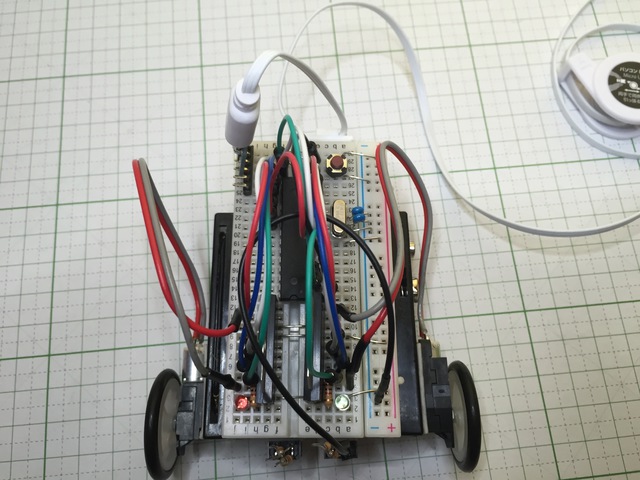
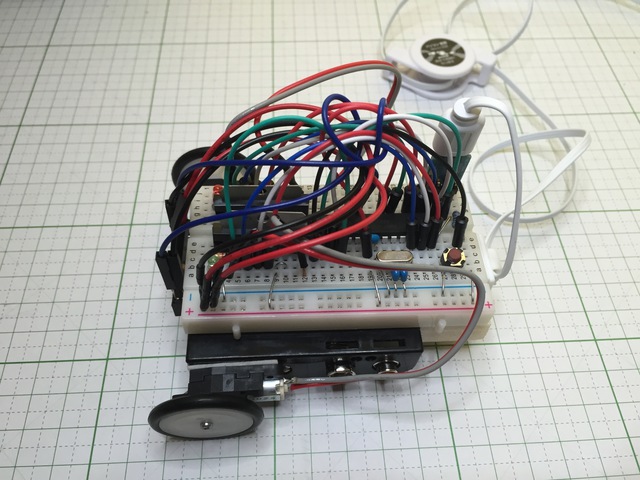
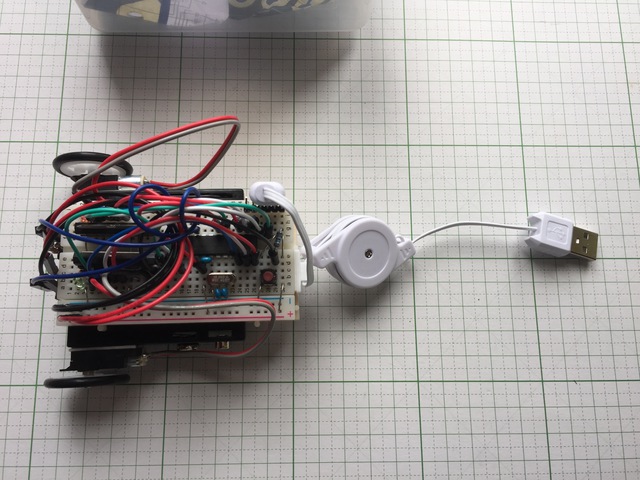
貼り付けたら、下の写真のようにUSBケーブルをはさみます。こうすることで、USBケーブルをひっぱってもブレッドボードが抜けにくくなり、また、スモウルボットの中心からUSBケーブルが後ろに出ることになるので、USBケーブルがスモウルボットの動作の邪魔になりにくくなります。
動作確認
さて、これで車っぽくなりましたので、スモウルビーから制御できることを確認してみましょう。
コンピュータとUSBケーブルを接続してから、スモウルビーを操作して、先ほどとまったく同じ下のプログラムを実行します。
すると、下の動画のように、2つのLEDが点灯・消灯した後にスモウルボットが前後に移動するはずです。動作を確認できたら、USBケーブルを外しておきます。
ここで、もし「スモウルボットV3を1秒進める」のときに、実際にはスモウルボットがバックしたり回転してしまう場合は、左右のモーターの赤色と灰色の線をブレッドボードに挿す場所が間違っている可能性があります。左のモーターは赤色を「aの4」、灰色を「aの12」、右のモーターは赤色を「iの12」、灰色を「iの4」に挿さっていることを確認してください。
(5) センサー(フォトリフレクター)の取り付け
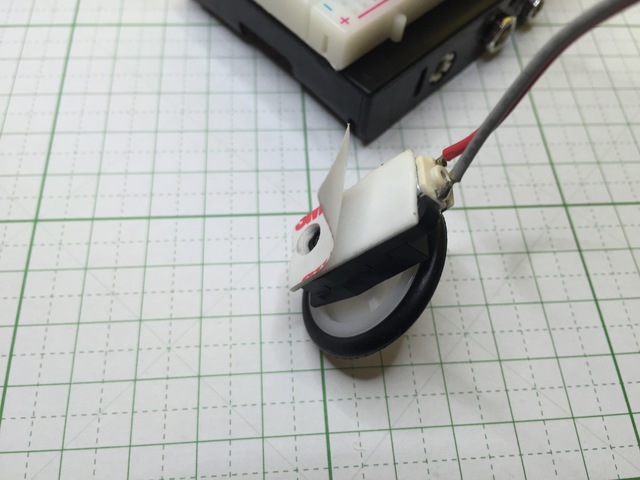
スモウルボットの目となって、黒い線と白い線を見分けるためのセンサーである「フォトリフレクター」を取り付けます。
2つのフォトリフレクターのリード線を短くカットして、両面テープでボディの前面に貼り付けて、ジャンパーコードを使って配線するだけです。
注意点としては、ジャンパーコードが抜けやすいのと、ジャンパコードが長いためにそのままだとスモウルボットの高さが高くなってしまうため、ジャンパコードを巻きつけるように配線しています。

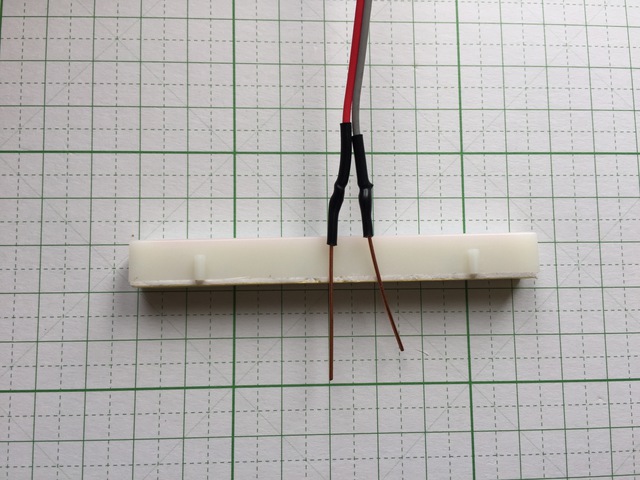
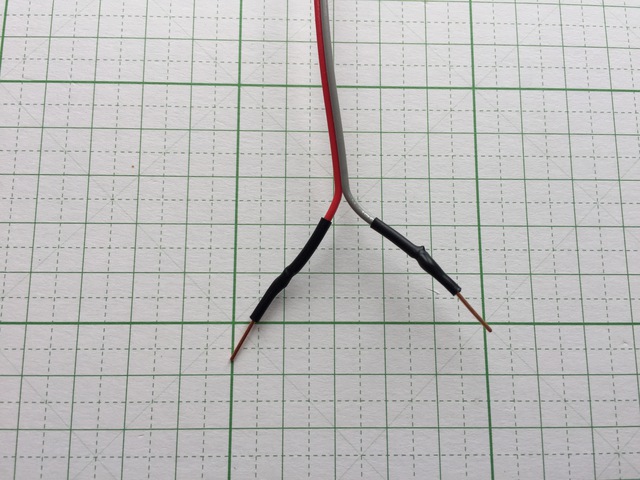
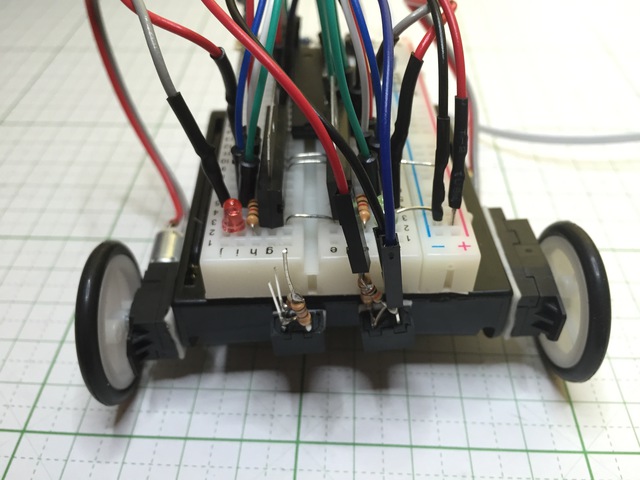
センサーのリード線のカット
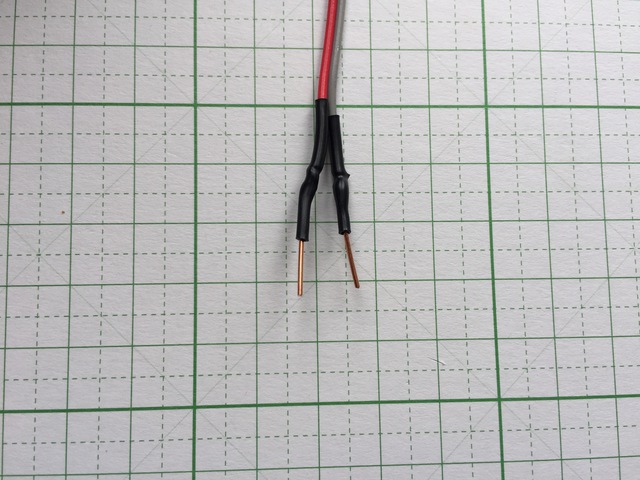
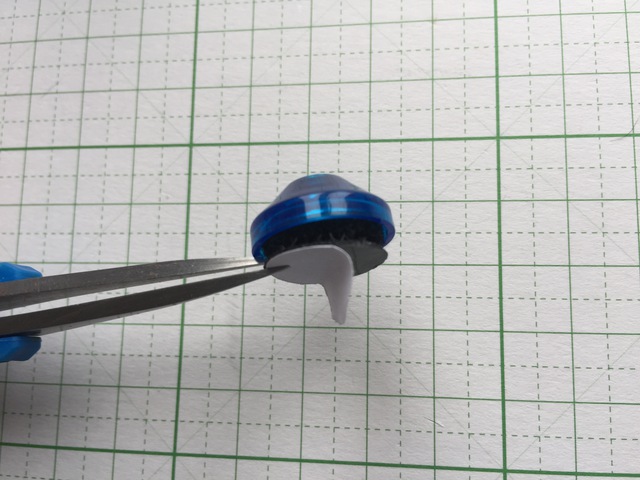
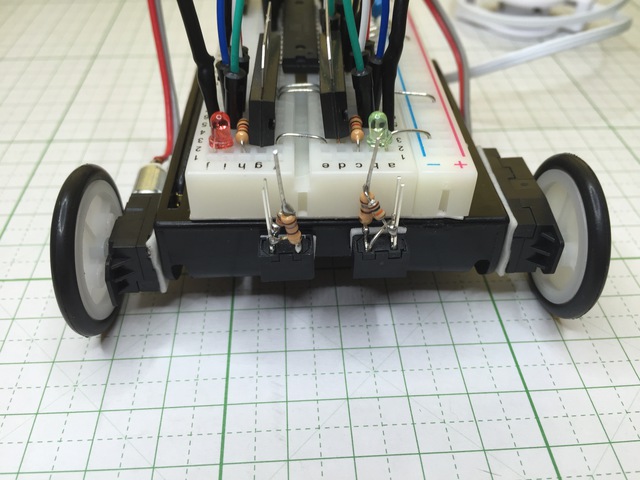
まずはリード線をカットします。下の写真のように抵抗から伸びている1本(写真では右のもの)は抵抗の上からブレッドボードの高さ分、そのほかの2本(写真では右のもの)は金属が固まっているところからブレッドボードの高さ分のところでカットします。
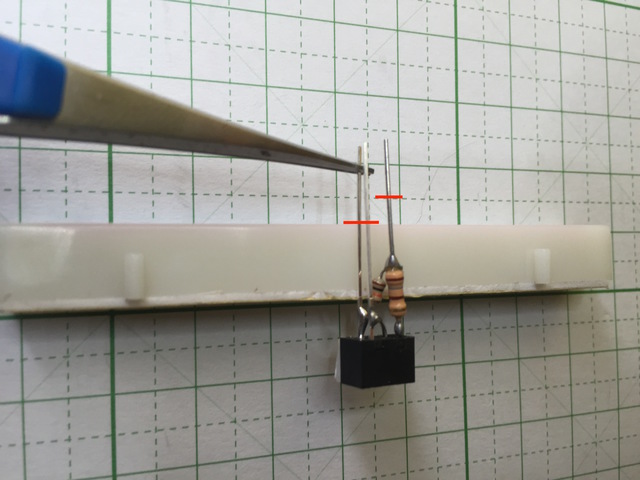
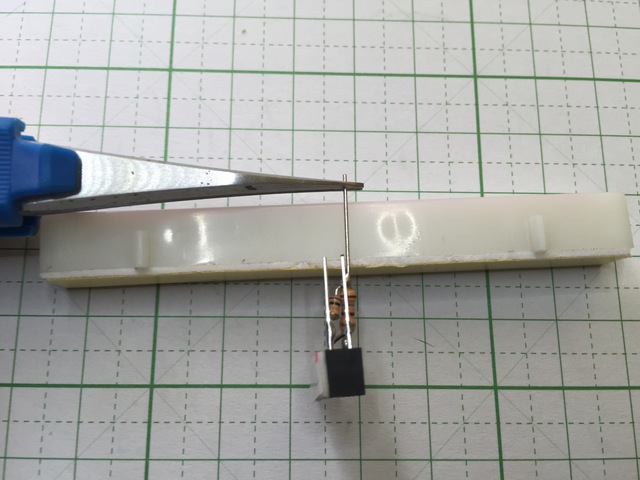
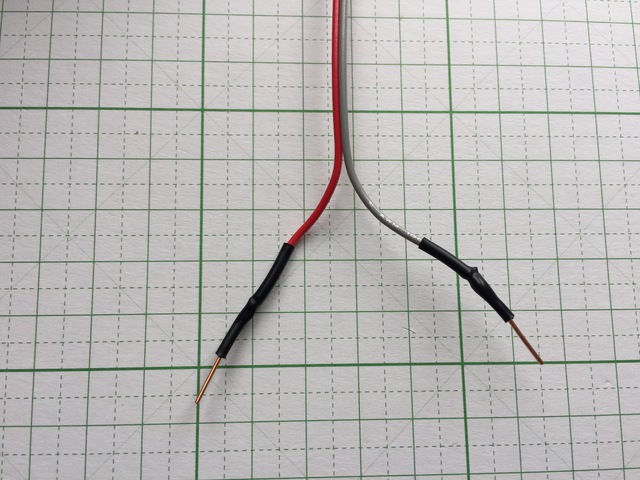
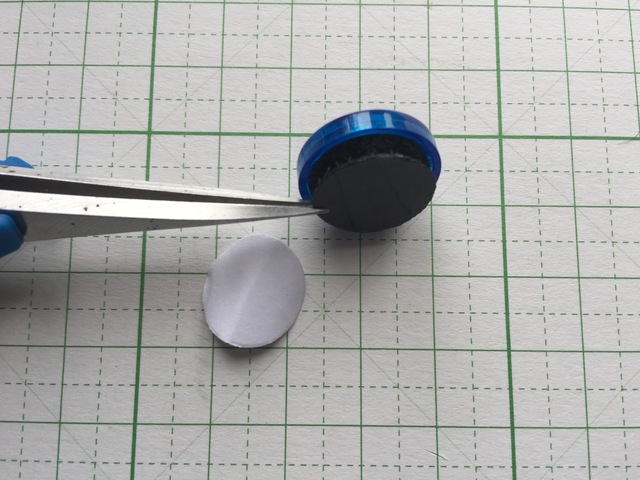
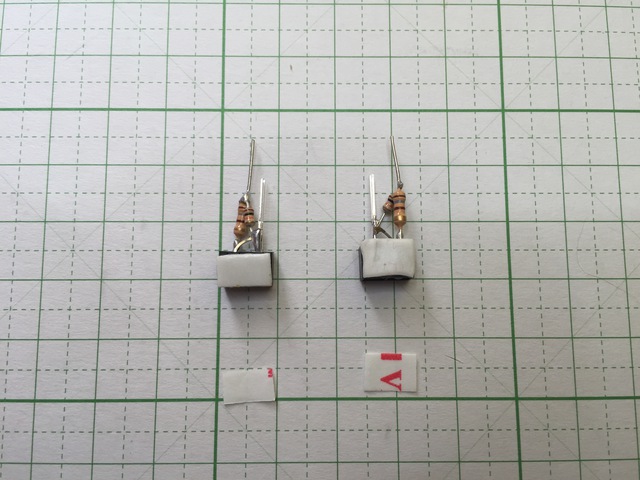
カット後は下の写真のようになります。

2つとも同じようにカットします。

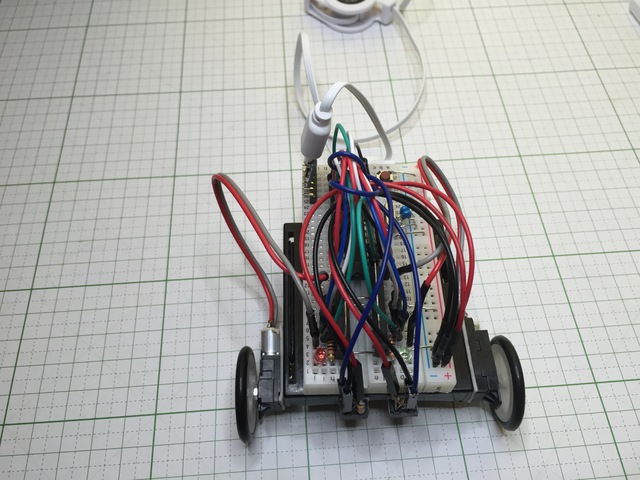
センサーのボディへの貼り付け
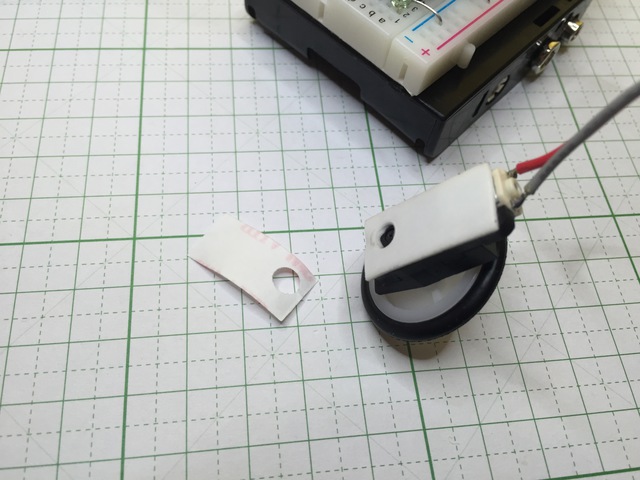
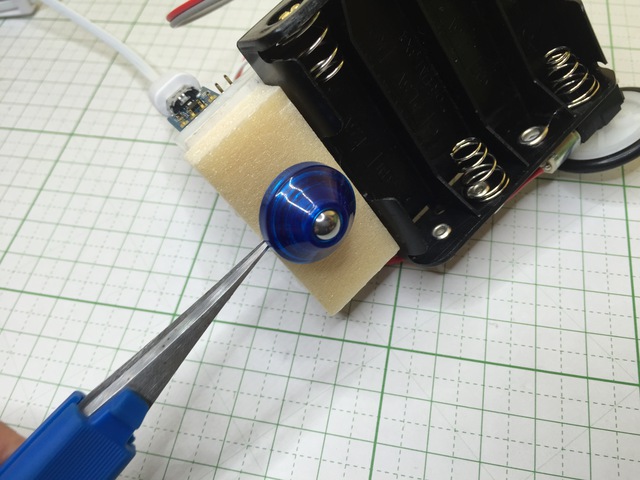
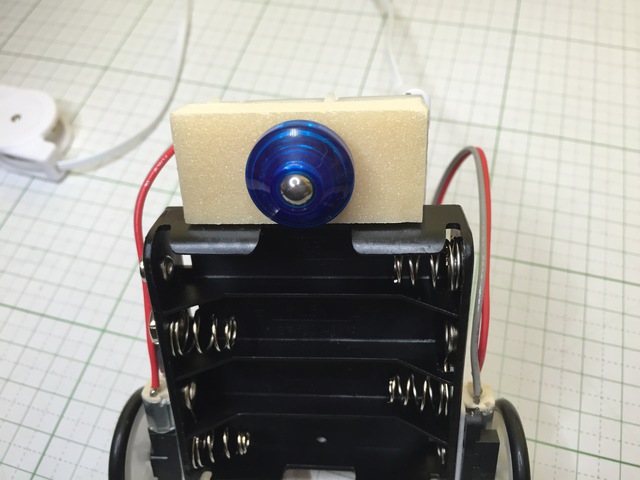
それぞれの両面テープを保護する紙を外します。
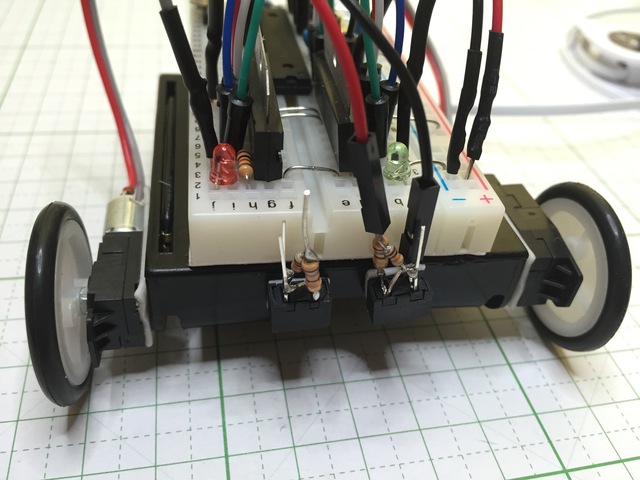
そして、写真のようにボディの前面に貼ります。左右はどちらでもかまいません。ただし、2つのセンサーの位置が近すぎると正しく動作しません。下の3枚の写真をよく見て貼り付けてください。
センサーの配線
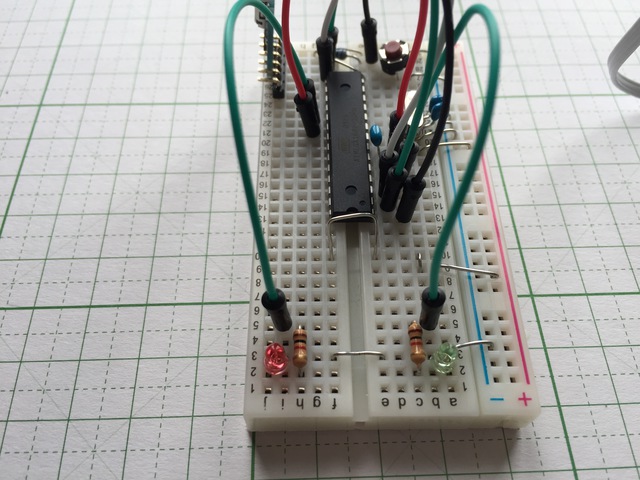
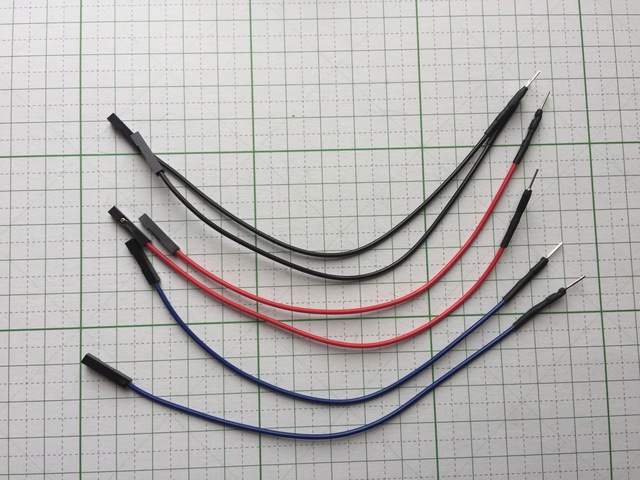
それでは、左右のセンサーに2組の黒・赤・青のジャンパーコードを配線します。
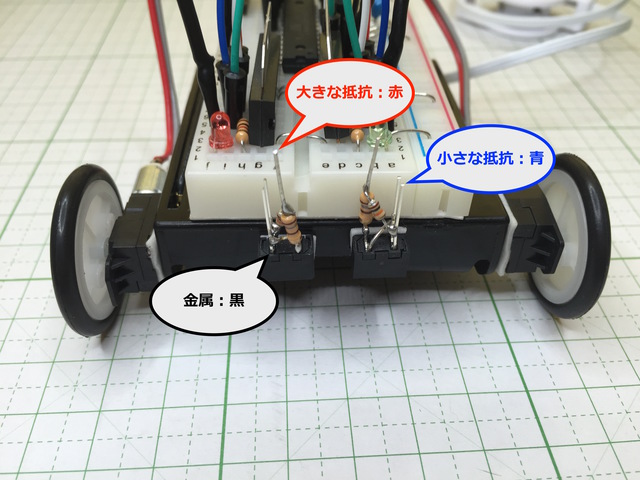
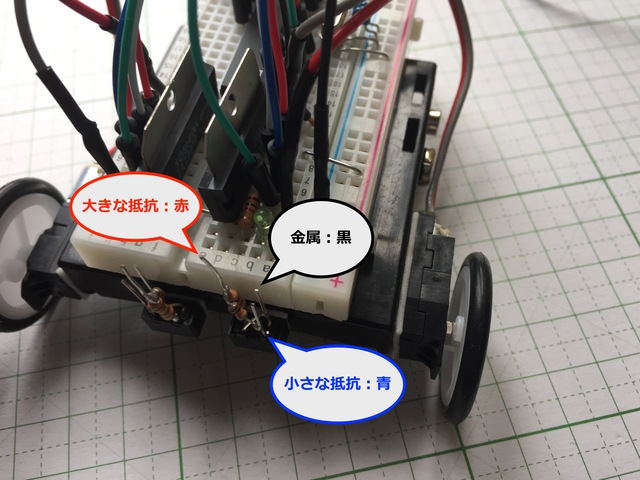
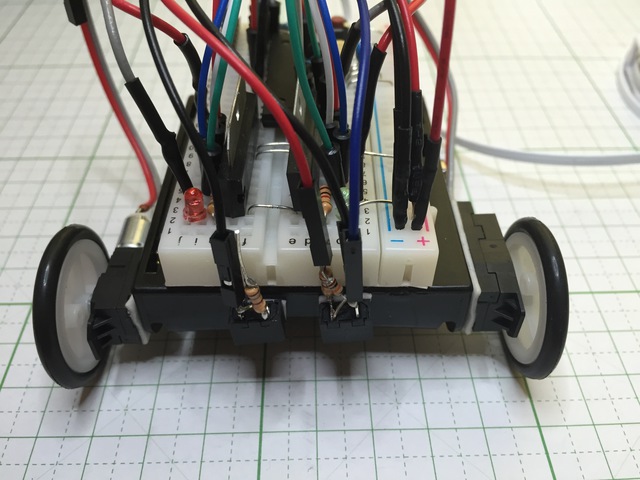
下の2枚の写真のように、大きな抵抗から出ている一番長いものに赤、小さな抵抗が付いているものに青、金属だけのものに黒のジャンパーコードを配線します。青と黒を間違えやすいので注意してください。
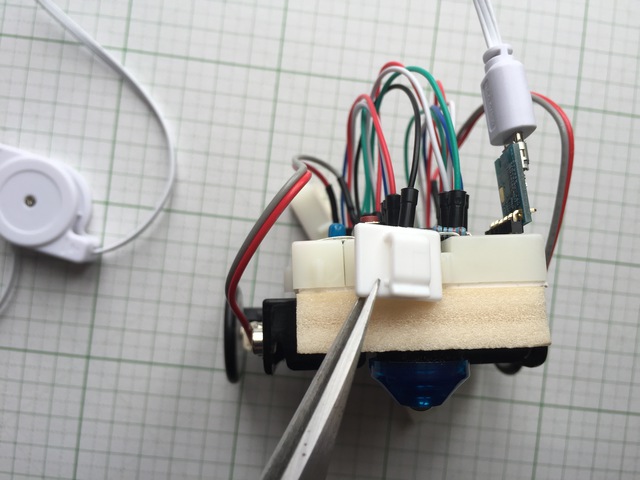
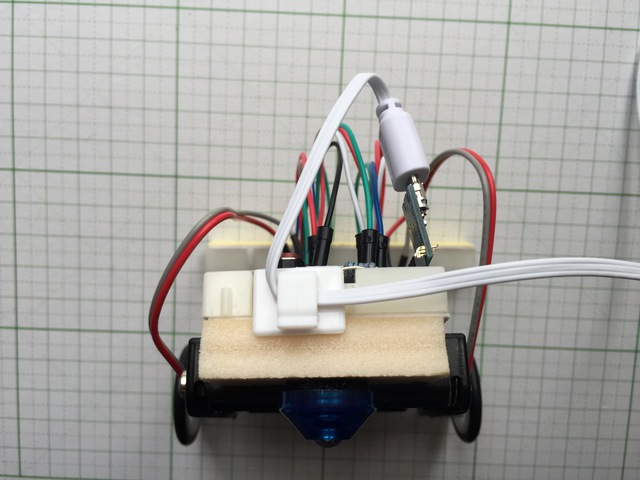
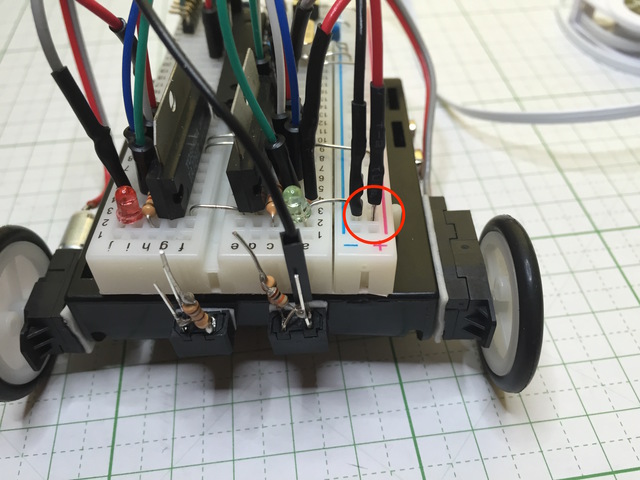
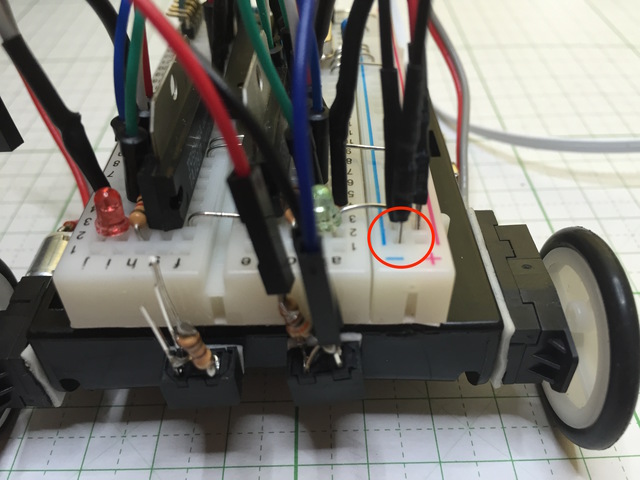
黒のジャンパコードの一方をブレッドーボードの「ー」(写真の赤い丸の部分)に挿します。
そして、写真のようにそのジャンパコードを他のものの間を通して...
前にもってきて...
写真のようにセンサーの金属だけのものに挿します。
上から見ると写真のように他のジャンパコードの間を通ってセンサーとに挿しているのがよく分かりますね。
次に写真のように赤のジャンパコードをブレッドボードの「+」に挿します。
これも先ほどのように他のジャンパコードの間を通して...
前の方に持ってきて、センサーの大きい抵抗の先に挿します。
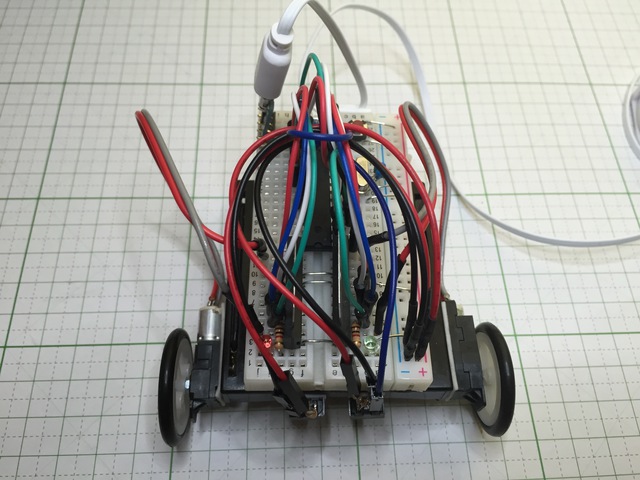
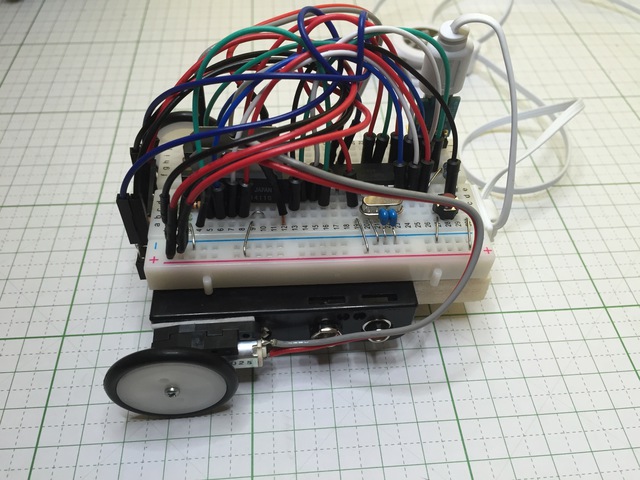
下の写真は横から見たものです。
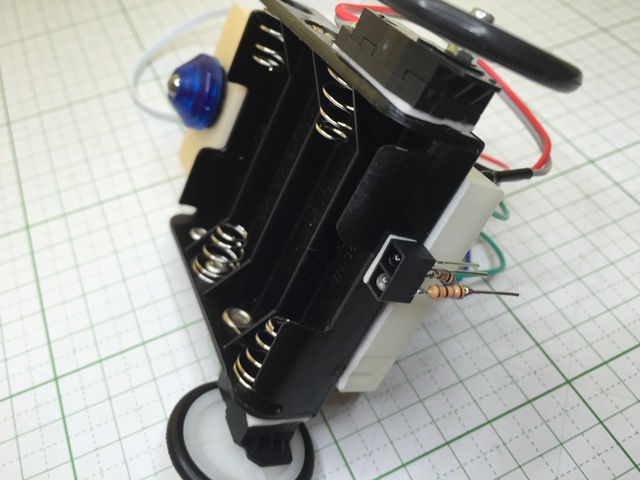
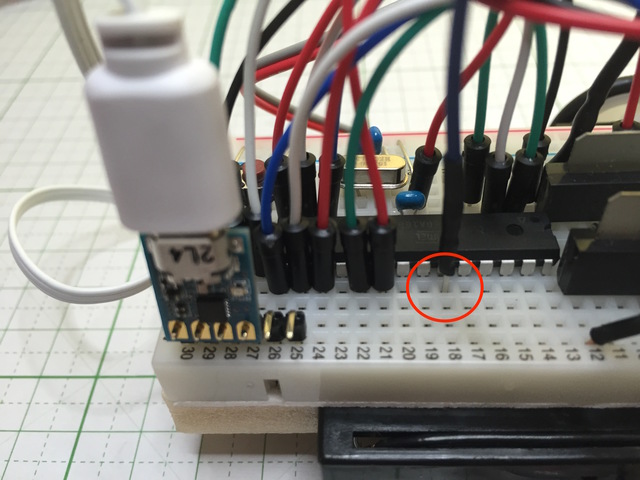
次に写真の赤い丸の部分のように、青のジャンパコードの一方をブレッドボードの「gの18」に挿します。
これも他のジャンパコードの間に通していきます。
写真のように先ほどの黒と赤のジャンパコードと同じところに反対側から通します。
そして、くるっと回して同じところにもう一度通します。他のジャンパコードを縛るようなイメージです。
そうしたら、前に持ってきてセンサーの小さい抵抗の先に挿します。
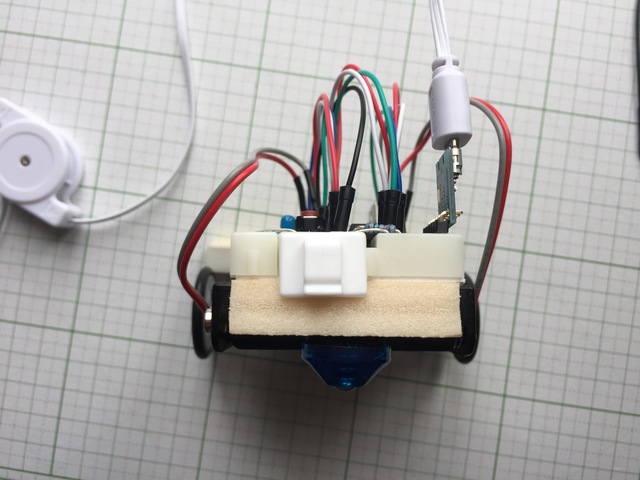
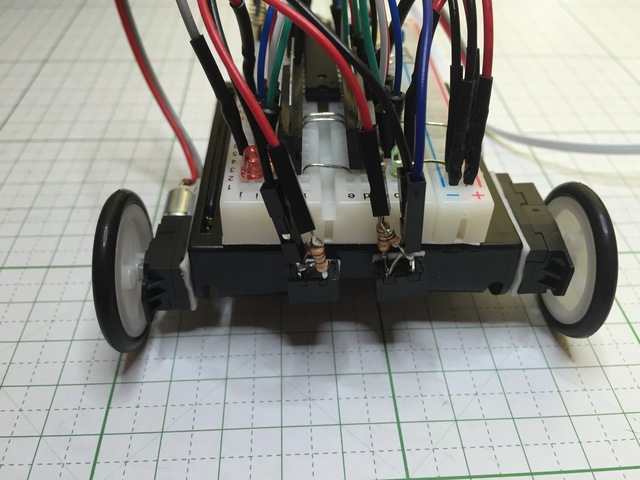
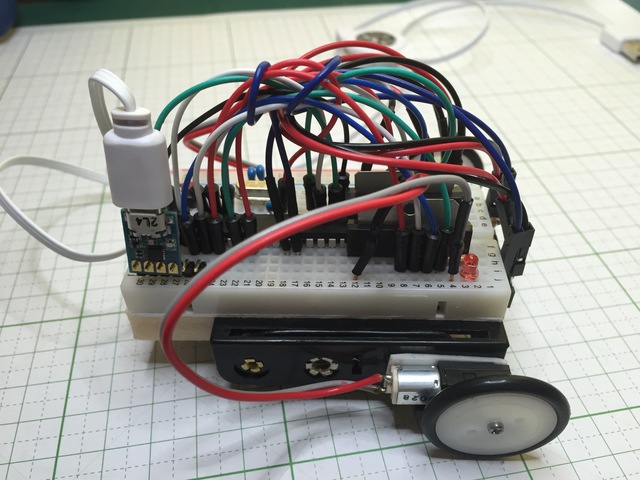
上から見ると写真のような感じです。これで写真の右側のセンサーの配線ができました。
次はもう一つのセンサーの配線です。
黒のジャンパコードの一方をブレッドボードの「ー」に挿します。
先ほどと同じように他のジャンパコードの間を通して...
センサーの金属だけのところに挿します。
次に赤のジャンパコードの一方をブレッドボードの「+」に挿します。
また、先ほどと同じように他のジャンパコードの間を通して...
前の方に持ってきて、センサーの大きい抵抗の先に挿します。
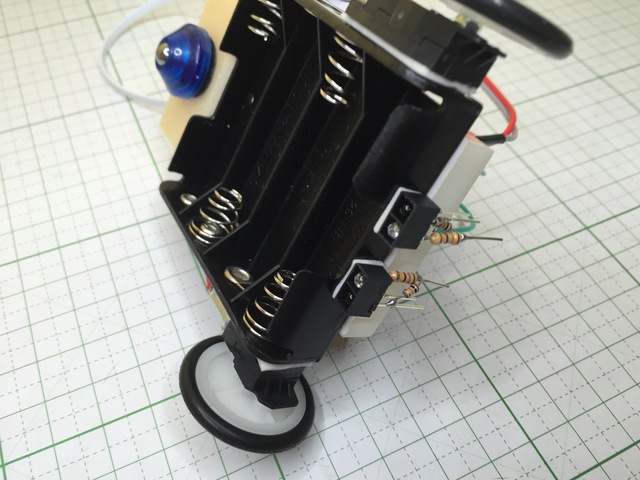
次に写真の赤い丸の部分のように、青のジャンパコードの一方をブレッドボードの「gの17」に挿します。
またまた、先ほどと同じように他のジャンパコードの間を通して...
くるっと回して...
前の方に通して...
センサーの小さい抵抗の先に挿します。
これでセンサーの配線が終わりました。
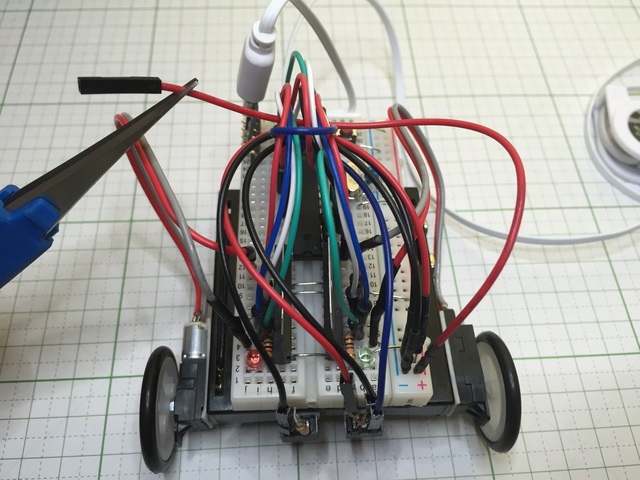
センサーの動作確認
それではセンサーの動作を確認してみましょう。
コンピュータとUSBケーブルを接続してから、スモウルビーを操作して下のプログラムを作って実行します。
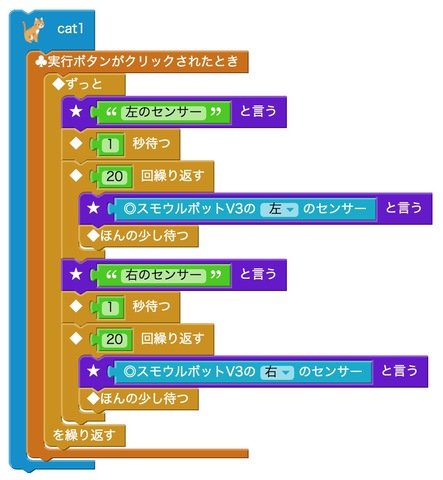
すると、下の動画のように、センサーの下に黒の線があるとセンサーの値が変わるはずです。
収納
最後は収納です。スモウルボットを持ち歩くときに、残った部材とケースの側面などにあたって壊れることを防ぐためにも、きちんと収納しておくことは大切なことです。
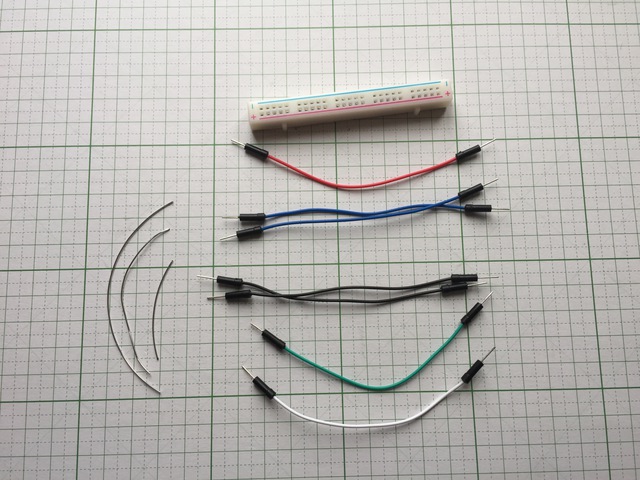
まずはスモウルボットの余った材料を袋に袋に入れます。

それをケースの一番下に入れます。

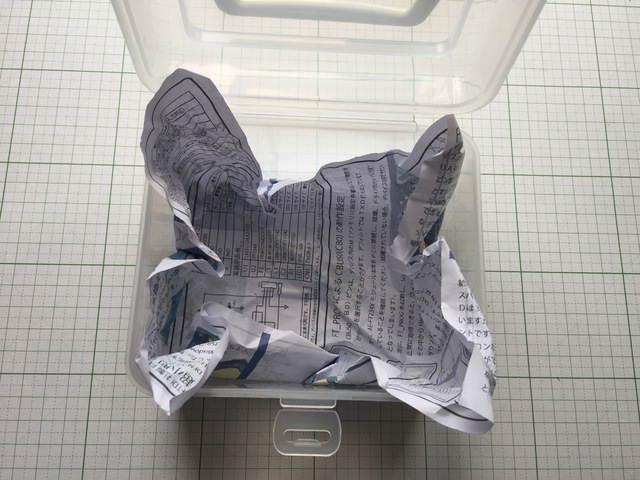
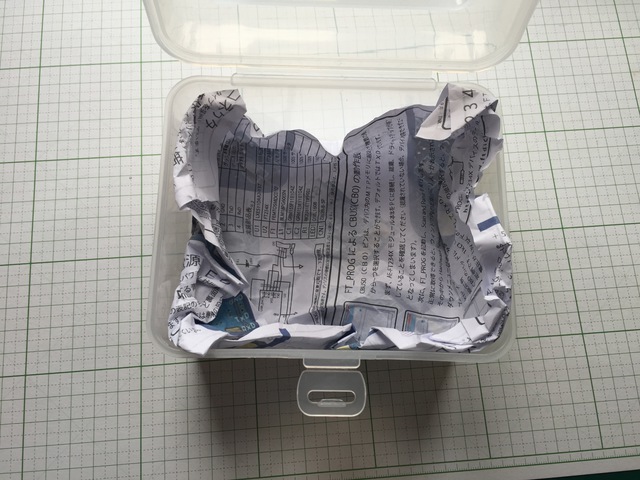
次に、写真のように梱包用の紙をケースに入れ、四隅を合わせます。
伸ばしたUSBケーブルを短くして...
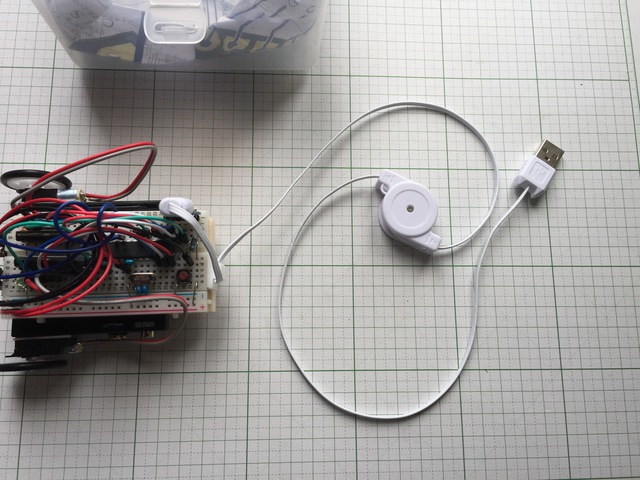
スモウルボットをケースに入れます。

そして、フタを閉じます。

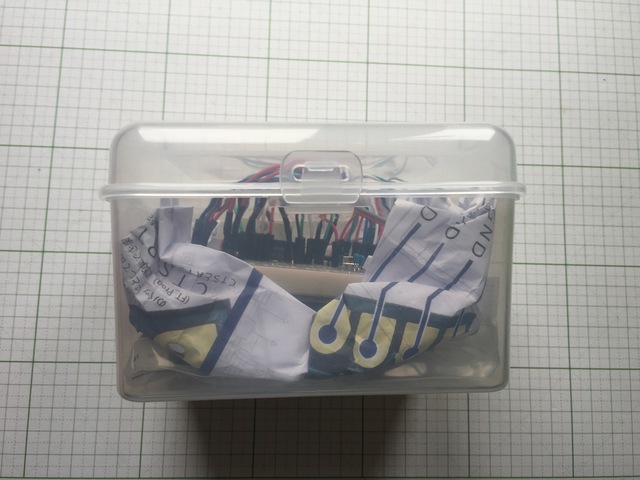
これでスモウルボットV3が完成です。スモウルボットV3を使ってロボットを制御するためのプログラミングを楽しんでもらえますと幸いです。